|
|
|
|
|
论文投稿150天即登顶刊,类人“灵巧手”迎重大突破 |
|
|
蛇年春节,有两件事儿让在家过年的北京大学人工智能研究院助理教授朱毅鑫喜上眉梢:一是DeepSeek异军突起;二是他们圣诞节前投出的“灵巧手”的论文早早收到了审稿意见,出人意料地顺利。
审稿人也不吝给出高度评价:“这一成果对机器人和整个人机交互领域都有着重要贡献。”
“稳了。”朱毅鑫心想,这项蛰伏3年多的研究终于要亮相了。
他们干得是一件顶难的事儿:让机器人拥有一双无需人为操纵、又能像人手那样拥有灵活操作能力的手。朱毅鑫告诉《中国科学报》:“(机械手)能像人手一样在不确定环境中保持高效灵活的操作能力,这对机器人在家庭、医疗和工业环境中的应用至关重要。”
6月9日,朱毅鑫团队联合北京大学武汉人工智能研究院、北京通用人工智能研究院、北京大学工学院和伦敦玛丽皇后大学等团队合作的这项成果——“高分辨率触觉感知机器手实现类人适应性抓取”,在线发表于《自然—机器智能》(Nature Machine Intelligence)。
 朱毅鑫(右1站立者)、赵秭杭(左一)、李宇飏(左二)在受访中。赵广立 摄
朱毅鑫(右1站立者)、赵秭杭(左一)、李宇飏(左二)在受访中。赵广立 摄
?
灵感就来源于人手
如果在手指涂上可以阻断触觉的麻药,你会发现连拿起水杯这样简单的操作,都变得异常困难。
“日常手部的动作之所以感觉很简单,是因为强烈依赖了触觉。”朱毅鑫告诉记者,人的手部结构复杂,功能也极为精密,由27块骨骼和34块肌肉组成,提供了24个自由度的灵活性,“因此,对人类手部功能的研究是具身智能与机器人学科研的前沿。”
在拿取物体时,人手会发挥“触觉反馈”和“运动功能”两大能力:触觉反馈包含通过肌肉、肌腱和关节感知力量的运动觉,以及通过皮肤感知接触状态、纹理、温度、摩擦力等物理特性的皮肤触觉;而运动功能则蕴含着与关节角度、位置及其运动之间关系的运动学,以及实现精准运动控制的动力学。
既然手部的触觉如此重要,那何不让机器手既有运动能力、又有触觉?
他们不是第一个想到这些的。但在以往的研究中,触觉反馈与运动能力的整合,一直是机器人研究领域中的重大挑战。
一来,触觉传感器的引入,会对机器人的运动灵活性造成显著影响;二来,即便获得了具备高分辨率触觉感知能力的机械手,如何高效地处理大量触觉数据,并以此驱动每个关节协同运动、使其在高自由度空间中像人手一样完成抓取等任务,同样是个“拦路虎”。
这也正是研究团队“秀操作”的部分。
朱毅鑫告诉《中国科学报》,受启发于人类手部的生物结构,他们设计开发了“基于全手触觉的机器人仿生手”(F-TAC Hand),简称其为“全触手”。全触手的过人之处,就在于它通过传感器与结构一体化设计“成功突破了这一瓶颈”。
全触手,它有哪些精巧的设计?
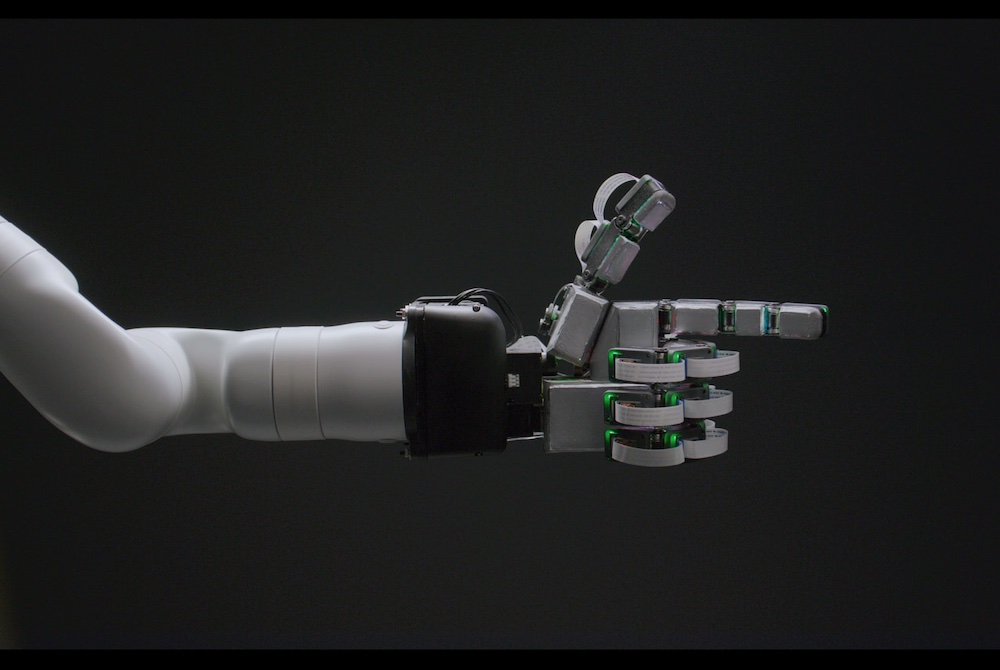 全触手。课题组供图
全触手。课题组供图
?
巧思妙想让机械手“有触觉并自适应抓取”
简要来说,人类手部触觉系统由两个关键要素组成——遍布皮肤的密集触觉传感器阵列和大脑皮层中专门处理和解释这些海量感知输入的神经处理机制。
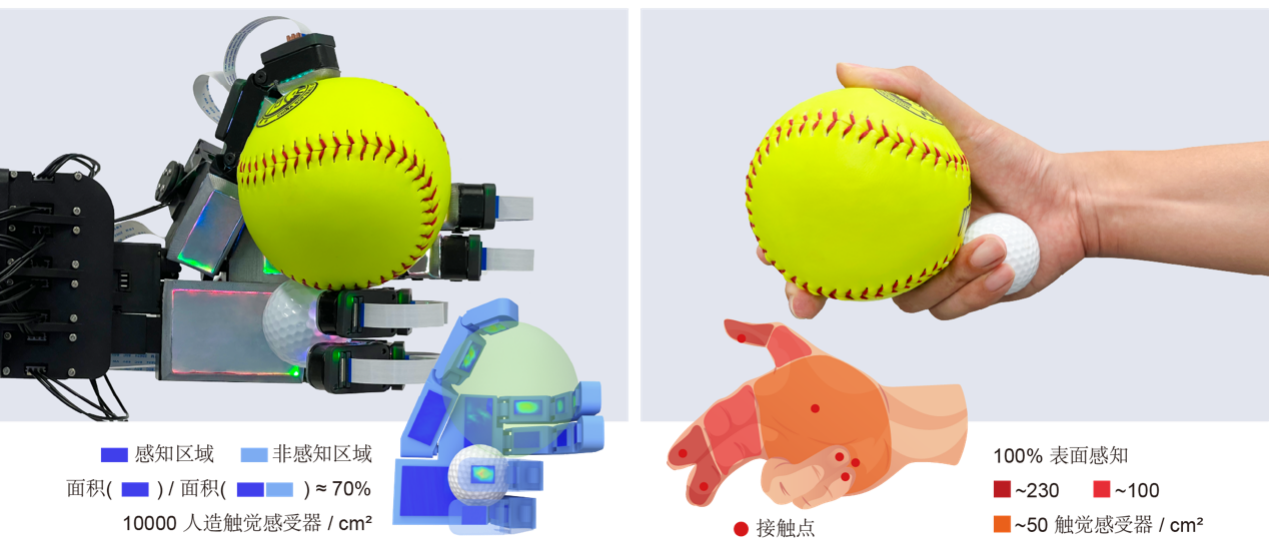
“我们的全触手模拟了这种设计。”论文第一作者、北京大学人工智能研究院博士生赵秭杭向《中国科学报》介绍说,他们将17个高分辨率触觉传感器、以6种不同配置集成在一起,并将其覆盖在五指机械手除“关节”外所有的区域,让机械手拥有了能感知物体大小、硬度等物理性质的指尖、指腹和手掌。
赵秭杭说,高分辨率触觉传感器覆盖了机器人手掌表面70%的区域,空间分辨率达到0.1毫米,“相当于每平方厘米约有一万个触觉像素,让机器人也能进行精确操作和适应性抓取”。
?
F-TAC Hand与人手比较。课题组供图
那么,机械手的适应性抓取能力,是从哪儿冒出来的?
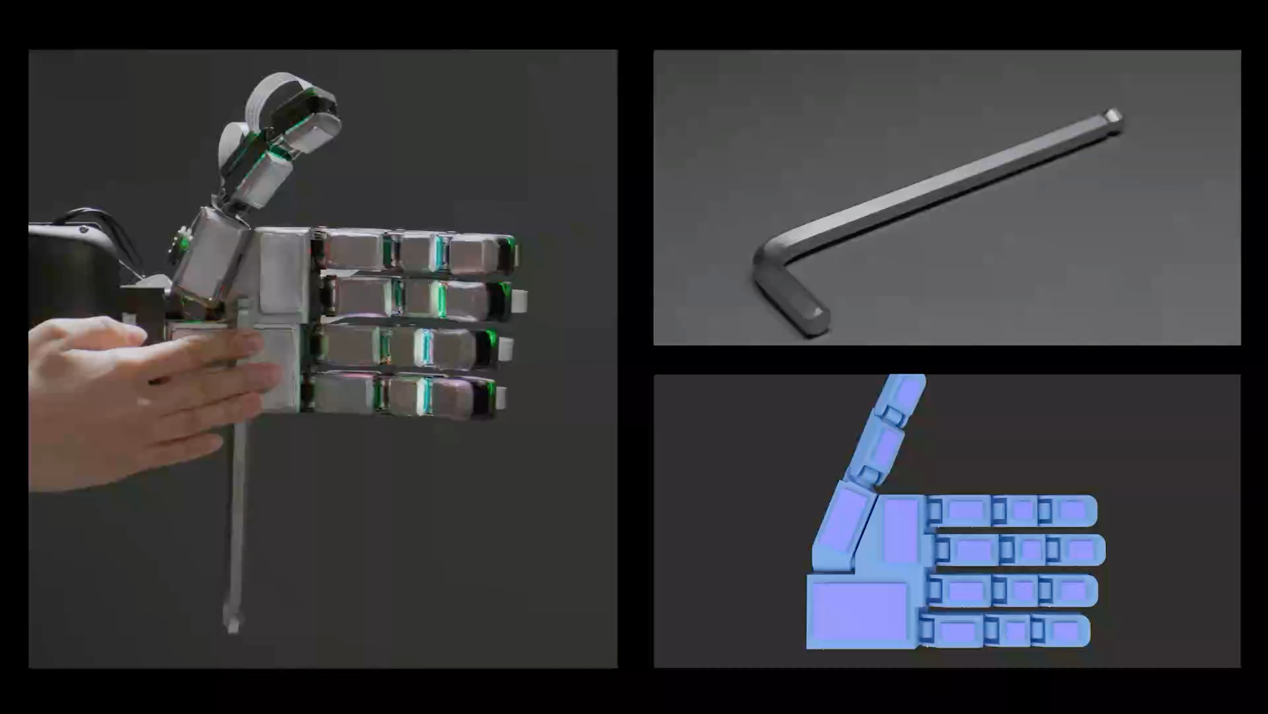
秘密藏在细节里。朱毅鑫告诉记者,团队在每个触觉传感器前都放置有一层薄膜和一台微型高速摄像机,这让其能“看到”动作的细微变化——当机械手能“看到”自己的操作,它也就能根据情况调整自己的抓取策略。
当然离不开算法的助攻。论文共同第一作者、一年级博士生的李宇飏向《中国科学报》解释道,他们基于概率模型开发了一种生成人类多样化抓取策略的算法,涵盖了人类常见的19种抓取类型。在抓取生成算法的加持下,机械手就像拥有了一个包含多样化策略的“说明书”,为它提供了丰富的抓取选择。
“除了夹持单一物体外,全触手还能通过全手高分辨率触觉,提前预判多物体抓取时因执行误差导致的物体碰撞风险,并及时调整运动策略。”李宇飏说,在现实环境中检测到此类风险时,全触手能在约100毫秒内感知情况并快速切换到替代策略。
“我们的算法支持了全触手熟练地执行从常用的‘力量抓取’到‘更精细的精准抓取’等多种抓取动作类型。”李宇飏对记者表示。
值得一提的是,在整体设计中,还有一个巧妙构思贯穿其中:他们将传感器设计为“既是感知元件又是结构部件”,从而在不牺牲灵活性的前提下,实现了前所未有的触觉覆盖范围。赵秭杭告诉记者,所有的这些设计保障了全触手能够像人类手掌一样,在抓取过程中实时感知接触变化并迅速调整,将极大提升机械手在不确定环境中的操作稳定性。
据团队介绍,在600次真实世界的实验数据显示,相比没有触觉反馈的系统,全触手的多物体抓取平均成功率从53.5%提升至了100%。
?
F-TAC Hand 抓握两个物体。课题组供图
?
F-TAC Hand实时高分辨触觉感知能力。课题组供图
圣诞节加急送审
据了解,朱毅鑫团队这项成果是有研究记录以来,国际上首个同时具备全手高分辨率触觉感知和完整运动能力的机器人手系统。
或许也正因如此,以该成果为主体的论文审阅速度之快,超出了朱毅鑫的想象。
时针拨回到2024年12月16日,朱毅鑫点下邮件的发送键。原以为能轻松一阵,没想到不久后他们就收到回复:“论文已被送审”。
“因为刚巧赶在西方圣诞节前夕,我们预计圣诞节后才会送审,没想到论文被加急送审,圣诞节前就收到了送审消息。”朱毅鑫边口算边说:“去掉两个假期,相当于130天论文就确定被接收了。”
朱毅鑫认为,他们的研究不仅是技术上的突破,更为理解智能的本质提供了全新视角。
“人类智能深植根于身体的感知能力,尤其是手部的触觉体验对我们认知世界至关重要。”朱毅鑫说,“全触手的成果表明,丰富的感知能力对于机器智能的发展同样不可或缺。”
近年来,以大语言模型为代表的基于数据训练和推理的人工智能取得了显著进步,但在真实世界中,机器人的感知和交互能力还存在诸多不足。
“我一直有一个目标,就是想让机器人变得更智能,更泛化。”赵秭杭告诉记者,他从小就对机器人有着浓厚兴趣,本科的机电工程专业又为其打下良好的基础,“我一直在思考如何提高机器人的交互能力,要想实现和物体、环境的交互,至少需要一个闭环的反馈系统,而触觉就提供了机器人与物体交互状态的直接反馈。”
但要把想法变成现实,注定要蜕几层皮、遭几遭罪。赵秭杭分享了一个小“事故”:疫情期间,研究进度一度搁置,一件小事就酿成大祸——实验室没人开空调,零下十几度的天气直接冻裂了传感器……
这倒没太打击到他:“我喜欢做机械设计,也相信尽管有困难,但只要按预期一点点地推进,就会实现目标。”
本科毕业于清华“通班”的李宇飏,有一顶聪明的脑袋和一种随时“自洽”的人生态度。他在通班与导师朱毅鑫结缘,毕业后就跟着后者攻读博士学位,主攻机器人和三维视觉领域。选择做科研,他只有一句话:
“也许到不了‘无人之境’,但我要出发了。”
李宇飏是那种性格比较内向、喜欢享受独处的人,他自认自己是“情绪稳定的卡皮巴拉”。做全触手这项课题,他觉得这是一件很酷的事:“以机器人手用筷子为例,我希望未来它不仅能抓住一双筷子,更能用筷子夹起其他物体,相当于机器手能使用工具进行抓取,这就很酷。”
朱毅鑫一直说,这项成果基于以往的科研积累、从过去4年的开发而来,但他觉得它代表着机器人乃至通用人工智能的未来。
“未来我们将继续深化触觉感知与机器人控制的结合,探索更加智能的体感交互范式,为实现真正意义上的通用人工智能奠定基础。”朱毅鑫说。
记者顺便问了一下,朱毅鑫课题组团队成员平均年龄只有不到25岁。那没错了,他们代表着未来。
相关论文信息:https://doi.org/10.1038/s42256-025-01053-3
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。