|
|
|
|
|
受“海马尾巴”启发的仿生软气动执行器 | MDPI Biomimetics |
|
|
论文标题:Seahorse-Tail-Inspired Soft Pneumatic Actuator: Development and Experimental Characterization
论文链接:https://doi.org/10.3390/biomimetics9050264
期刊名:Biomimetics
期刊主页:https://www.mdpi.com/journal/biomimetics
人类一直对生物启发结构及其再现感到着迷。许多科学家经常从自然本身获得灵感进行技术创新,如通过复制蜘蛛,研究得到旋转滚动隔膜执行器,受象鼻启发,人造肌肉纤维得以实现。随着软机器人技术的出现,仿生结构的复制大大增加,软机器人领域取得了长足进展。近年来,已经复制了章鱼、水母、蟑螂、蠕虫等,得到多种仿结构,如手或肢体。这些结构通常用于抓握和处理精细物体或具有复杂未知形状的物体。海马的灵感来自于它尾巴的高度自由度,这是制作柔软原型的绝佳背景。
来自拉奎拉大学工业和信息工程与经济系的研究团队在 Biomimetics 期刊上发表了文章,提出了一种受海马Hippocampus reidi尾巴启发的新型仿生软气动执行器。该执行器的开发目的是这项工作的目的是开发用于维持受海马运动启发的多腿机器人的腿,该机器人可以通过其尾巴来支撑其重量,其变形将为运动提供动力。
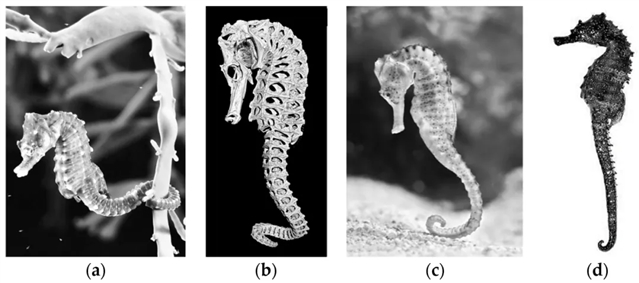
图1. (a) 尾巴固定在海底植物上的H. hippocampus;(b) H. reidi种的板和环的细节;(c) 从海床分离的细节;(d) 尾巴微微向后弯曲的海马。
研究过程与结果
研究对象
研究人员以雷氏海马 (H. reidi) 为研究对象,对海马尾巴的解剖学和运动行为的研究为该执行器的机械设计提供了参考。
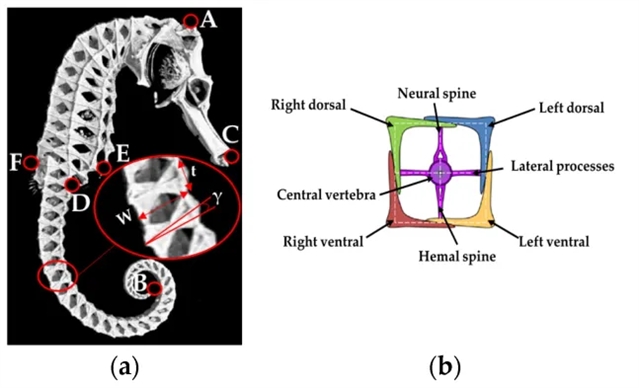
图2. (a) 海马尺寸详图;(b) 尾段部件详图。
仿生执行器的机械设计方法
软气动执行器Soft Pneumatic Actuator (SPA) 的3D建模由受海马尾部骨骼启发的增强体和受其上皮组织启发的覆盖体组成。通过3D打印的热塑性聚氨酯形成增强体 thermoplastic polyurethane (TPU),结合可复制外部上皮组织的功能的R PRO20 硅橡胶结构 (覆盖体),模仿软体机器人的骨骼装置,可以制作出执行器的原型。覆盖体内部设有一个充进料气动通道,充当内部肌肉。
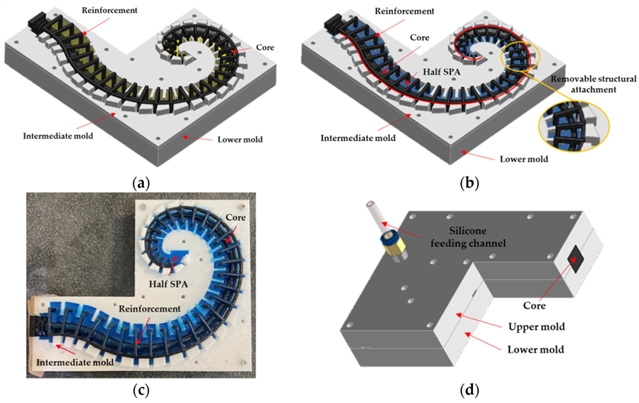
图3. SPA制造工艺:(a) 第一阶段:模具装配与待填充型腔 (黄色部分);(b) 第一阶段:实现了半SPA (蓝色),中间模具与钢筋之间的连接 (沿红线) 以及钢筋与芯的连接细节 (黄圈);(c) 第一阶段末实验俯视图;(d) 第二阶段:将中间模具更换为上模具,用双作用气缸注射硅橡胶。
实验表征
对执行器原型进行了实验表征,以获得在零外部载荷作用下的压力-变形关系、不同变形初始速率下施加的力-压力关系以及激活/停用时间。具体而言,执行器在1.8 Bar压力下完全伸展154.5 ms,最大力为11.9 N,激活和停用时间分别为74.9 ms和94.5ms。
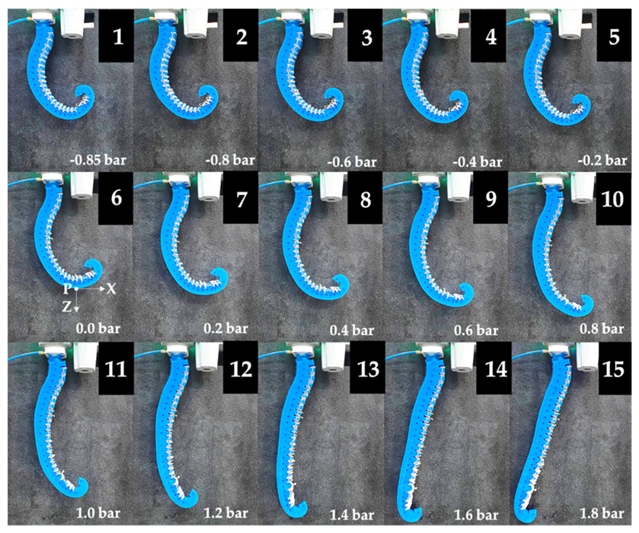
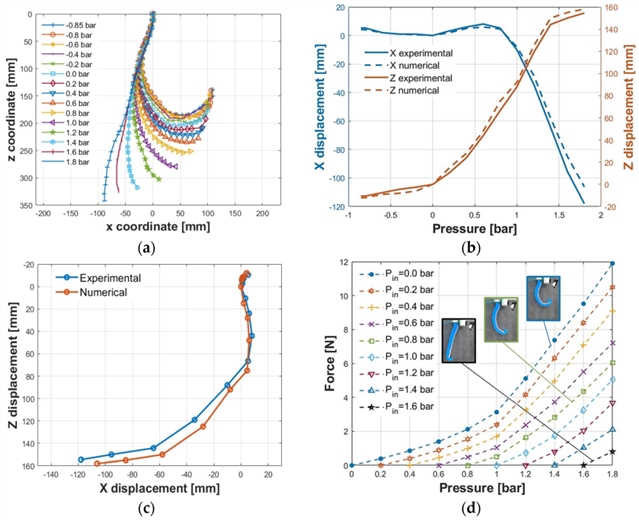
图4. 在零外载荷的等压试验中,致动器的变形随压力的变化以及执行器的运动学和动力学行为。
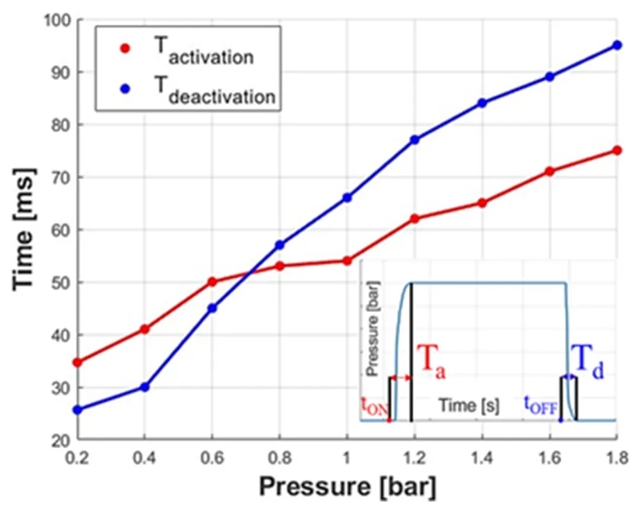
图5. 时间测试:激活和停用时间作为进料压力的函数。
研究总结
本研究创新性地开发了一种仿生软气动致动器,灵感来源于海马尾巴。这项研究有助于新技术的开发,如可卷曲机器人或新型终端设备,另一方面,这一过程有助于骨骼结构和上皮组织的整合。通过模仿自然界的设计,我们可以更好地应对未知的环境和复杂的任务,为科技进步带来无限的可能性。
Biomimetics 期刊介绍
主编:Stanislav N. Gorb, Kiel University, Germany
期刊致力于研究生物体的最基本方面及其特性向人类应用的转移。期刊旨在为材料科学、机械工程、纳米技术和生物医学领域的研究人员和专业人士提供一个平台,通过在工程系统、技术和生物医学中利用生物启发的设计,开发实现可持续创新的解决方案。
|
2024 Impact Factor
|
3.9
|
|
2024 CiteScore
|
4.2
|
|
Time to First Decision
|
19.5 Days
|
|
Acceptance to Publication
|
2.8 Days
|
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






