|
|
|
|
|
北航团队破解混合车辆编队避障难题!新方法抗干扰还防攻击 Engineering |
|
|
论文标题:Robust Platoon Control of Mixed Autonomous and Human-Driven Vehicles for Obstacle Collision Avoidance: A Cooperative Sensing-Based Adaptive Model Predictive Control Approach
期刊:Engineering
DOI:https://doi.org/10.1016/j.eng.2024.08.015
微信链接:点击此处阅读微信文章
北京航空航天大学田大新教授团队在中国工程院院刊《Engineering》发表题为“Robust Platoon Control of Mixed Autonomous and Human-Driven Vehicles for Obstacle Collision Avoidance: A Cooperative Sensing-Based Adaptive Model Predictive Control Approach”(面向障碍物避碰的混合车辆编队鲁棒控制——一种基于协同感知的自适应预测控制方法)的研究性文章,通讯作者为周建山副教授。该研究提出了一种针对混合车辆编队(包括联网自动驾驶车辆和人类驾驶车辆)的鲁棒控制方法,旨在应对障碍物检测与编队控制中的不确定干扰问题,如传感器故障、驾驶员操作不准确以及无线网络中的误导性感知信息等。
研究团队指出,随着车联网和自动驾驶技术的发展,混合交通流中车辆的动态行为协调成为重要课题。在混合车辆编队中,联网自动驾驶车辆(CAV)作为“移动执行器”,能够调控人类驾驶车辆(HDV)的行驶行为。然而,现有研究大多集中于纯自动驾驶车辆编队或混合编队的一维纵向动力学控制,难以满足障碍物规避所需的二维时间变化几何约束。为此,研究团队提出了一种结合鲁棒信息感知与编队控制的二维鲁棒控制方法,包含一辆联网自动驾驶车辆作为领航车和多辆人类驾驶车辆作为跟随车。
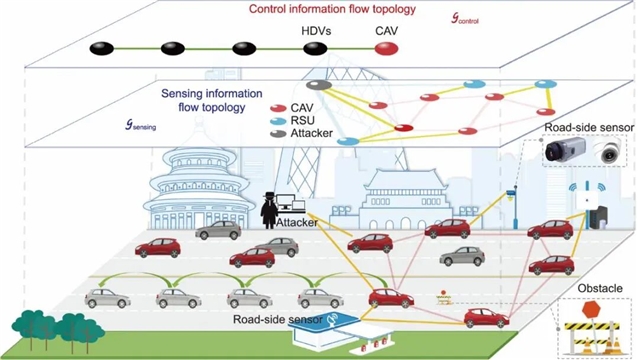
图1 在一个车队行驶场景中,由一辆CAV作为车队的领航车,车队中还包含多辆HDV作为跟随车。借助车与车(V2V)以及车与基础设施(V2I)之间的通信,领航CAV可以与其他CAV以及路侧单元(RSU)协同合作,构建一个协同式车?路感知网络,用图 表示。该感知网络旨在以分布式协同的方式探测并定位道路上的未知障碍物。此外,在由CAV和HDV组成的混合车队中,信息流拓扑结构由图 表示,采用简单的“前车-后车”结构。由于HDV只能感知其前车的状态信息,因此 被用于HDV本地的跟驰控制策略中。
该研究的核心创新之一是提出了一种协作的车辆–基础设施感知方案,能够以分布式和自适应的方式处理来自多个节点的信息,同时抑制恶意攻击者的误导性数据。通过这种感知方案,领航的联网自动驾驶车辆可以实时、准确且鲁棒地估计障碍物的未知位置,并引导同一编队中的人类驾驶车辆临时变道以避免碰撞。此外,研究团队还提出了一种具有鲁棒性的分布式跟车控制方案,以确保跟随的人类驾驶车辆在面对不确定干扰时的编队控制稳定性,并给出了该控制框架下的弦稳定性理论证明。
研究团队进一步开发了一种自适应模型预测控制(MPC)方案,应用于领航的联网自动驾驶车辆控制。该方案通过动态更新线性化预测模型参数与障碍物规避的几何约束,显著提升了模型精度与控制效果。同时,针对跟随的人类驾驶车辆,研究团队提出了一种鲁棒的分布式跟车控制方案,考虑了二维动力学中的外部不确定扰动,并基于闭环编队系统中输入到状态的弦稳定性,为受扰人类驾驶车辆的二维动力学稳定性提供了理论保障。
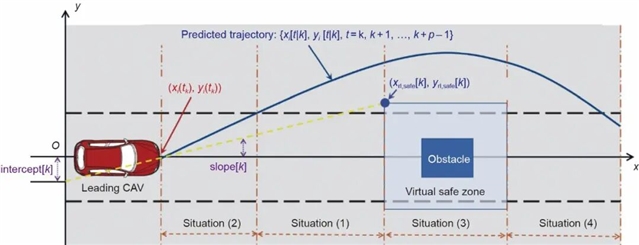
图2 领航CAV规避位于道路中央障碍物的典型场景。领航CAV需规避位于道路中央的障碍物,其规划轨迹将遵循“向左变道→超越障碍物→返回原车道”的行驶策略。为实现避障保障,车辆在预测轨迹各点处需始终位于该点与虚拟安全区域左上角连线的上方。
仿真结果表明,所提出的方法能够有效滤除来自恶意攻击者的误导性感知信息,显著降低障碍物感知的均方偏差,并接近理论误差下限。此外,该控制方法能够在确保稳定性和鲁棒性的前提下,成功实现混合编队的障碍物避让,并应对外部攻击和不确定干扰。此项研究针对混合车辆编队在障碍物碰撞规避任务中所涉及的二维几何约束进行建模,并将其嵌入控制框架中,从而填补了现有研究在该领域的空白,为未来混合交通流的协调控制提供了新的思路和方法。
论文信息:
Daxin Tian, Jianshan Zhou, Xu Han, Ping Lang. Robust Platoon Control of Mixed Autonomous and Human-Driven Vehicles for Obstacle Collision Avoidance: A Cooperative Sensing-Based Adaptive Model Predictive Control Approach. Engineering, 2024, 42(11): 255-279 DOI:10.1016/j.eng.2024.08.015
更多内容
新框架助力高速公路车辆碰撞检测,提升驾驶安全
浙大研究:完全自动驾驶汽车发生事故,乘客要担责吗?
南洋理工大学团队创新强化学习算法,为自动驾驶安全决策 “保驾护航”
李骏院士等:智能网联汽车安全
Engineering征稿启事:人工智能赋能工程科技
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






