|
|
|
|
|
华中科技大学谢远龙团队:室内自主移动机器人传感技术综述 | MDPI Sensors |
|
|
论文标题:A Review of Sensing Technologies for Indoor Autonomous Mobile Robots
论文链接:https://www.mdpi.com/1424-8220/24/4/1222
期刊名:Sensors
期刊主页:https://www.mdpi.com/journal/sensors
文章导读
本文系统综述了室内自主移动机器人 (AMR) 的传感技术,分析单传感器 (IMU、超声、红外、LiDAR、视觉、射频) 的优势与局限,探讨多传感器融合算法 (卡尔曼滤波、粒子滤波、神经网络) 及未来趋势。研究强调感知技术在室内无GPS环境下实现定位、SLAM及避障等AMR核心功能的关键作用。
研究内容
(1) 单传感器技术 (Single Sensor Technologies)
IMU传感器输出频率较高,广泛应用于移动机器人定位与SLAM领域。作为本体感受型传感器,其感知过程不受环境条件影响,但在障碍物检测方面能力有限。为抑制误差累积,IMU常与编码器结合,作为短途里程计使用,并集成于传感器融合框架中,以提升移动机器人定位与SLAM的精度。
超声波传感器的测距精度低于红外传感器和激光雷达,因此近年来在移动机器人定位与SLAM中作为主传感器的应用较少。然而,其在障碍物检测方面具有明显优势,被广泛用于移动机器人的避障任务。
红外传感器属于光学传感器,易受环境光或反射体干扰,测量稳定性较差。但其成本极低,常作为辅助传感器用于移动机器人对障碍物或目标的距离检测。
激光雷达与视觉传感器是移动机器人SLAM中最常用的两类传感器,均支持未知环境下的自主导航。激光雷达在测距精度上更具优势,而视觉传感器能够获取更丰富的环境信息。需要注意的是,激光雷达的测量易受透明或高反射物体的干扰;视觉传感器则凭借强大的物体识别能力,在障碍物或目标检测方面表现突出,可有效过滤障碍物数据,进而提升机器人在导航过程中的定位精度。
射频 (RF) 传感器也广泛用于移动机器人定位,其定位精度不受低能见度等环境因素的影响。然而,基于RF的定位系统需依赖已知位置的锚节点,且无法直接提供机器人的朝向信息。
表1. 传感器的特性和应用
|
传感器
|
优势
|
局限
|
典型应用
|
|
IMU
|
高输出频率、抗环境干扰
|
依赖初始条件、误差累积
|
短时里程计辅助定位
|
|
超声传感器
|
低成本、透射/反射物体检测佳
|
易受噪声干扰、长距离衰减
|
玻璃/镜面障碍物检测
|
|
红外传感器
|
低成本、响应快
|
易受环境光干扰
|
近距离障碍物检测
|
|
LiDAR
|
测距精度高、建图高效
|
受透明/镜面物体干扰
|
2D-SLAM (如Gmapping)
|
|
视觉传感器
|
环境信息丰富、语义理解强
|
计算量大、光照敏感
|
语义SLAM、动态障碍物识别
|
|
射频技术
|
穿透性强、环境鲁棒性高
|
需预设锚点、无法提供朝向
|
UWB/WiFi指纹定位
|
(2) 多传感器融合 (Multi-Sensor Fusion)
各类传感器能够采集不同形式的测量数据,通过传感器融合可更全面地获取环境信息,从而提高任务执行中的定位效率。需要注意的是,每种传感器都具有其独特的优势、局限性与适用场景。传感器信息融合能够综合利用各传感器的优点,弥补单一传感器的不足,进而提升移动机器人的定位精度与障碍物识别效率,适应多样化的工作环境。
在传感器数据融合算法方面,主流方法包括基于卡尔曼滤波器、粒子滤波器及其改进形式,以及神经网络等。卡尔曼滤波器及其衍生算法适用于高斯分布假设下的线性系统;而在处理非高斯或非线性问题时,其性能受限,误差可能增大。粒子滤波器 (又称蒙特卡洛方法) 能够处理任意分布,通过一组粒子对移动机器人的位置概率密度函数进行近似,粒子聚集区域对应较高概率。每个粒子代表一个假设位姿,其权重反映该假设与真实状态的匹配程度。通常,全局定位需大量粒子覆盖全图,计算复杂度高;而姿态跟踪所需粒子数较少。为提高全局定位效率,研究者常采用“先粗定位、后精定位”的策略,如图1、2所示。
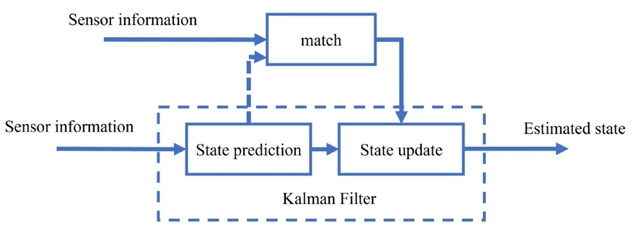
图1. 基于卡尔曼滤波的多传感器融合算法。
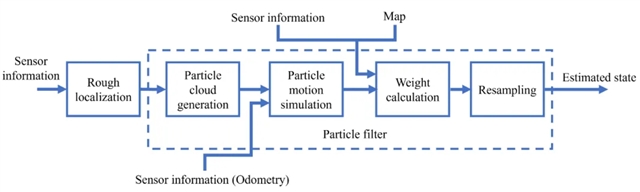
图2. 基于粒子滤波的多传感器融合算法。
神经网络因其能够自动从数据中提取特征、避免人工设计特征的局限性,并具备较强的泛化能力与鲁棒性,被广泛用于多传感器融合。与卡尔曼滤波相比,神经网络更适用于非线性系统,并能达到更高精度。
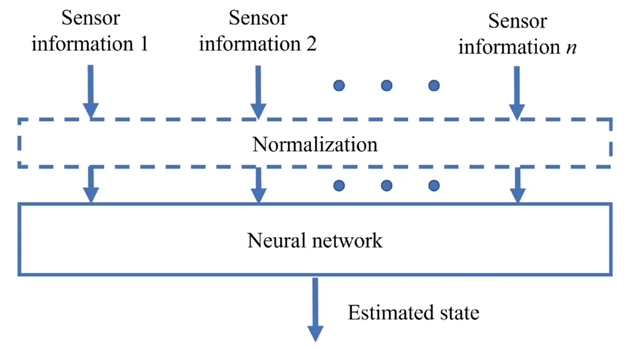
图3. 基于神经网络的多传感器融合算法。
加权平均法作为一种简洁高效的融合策略,具有良好的实时性,其核心在于权值分配与校正策略的设计。然而,加权平均法未考虑状态间的时序关系,在高动态环境中抗干扰能力较差。
图优化算法也常用于多传感器融合框架中。图优化方法能够有效处理非线性问题,但由于需维护和优化历史状态节点,计算复杂度较高,实时性仍面临挑战。机器人的状态优化通常在回环检测或重定位时进行。
表2. 多传感器融合传感技术和应用。
|
融合方法
|
核心机制
|
代表研究
|
|
卡尔曼滤波改进
|
线性高斯系统状态迭代预测-更新
|
EKF融合视觉/LiDAR-SLAM
|
|
粒子滤波
|
蒙特卡洛采样近似概率分布
|
视觉粗定位+LiDAR精定位
|
|
神经网络
|
端到端特征提取与非线性映射
|
FusionLoc架构融合相机/LiDAR重定位
|
|
加权平均法
|
权值分配与校正策略的设计
|
编码器+相机
|
|
图优化
|
位姿图最小化误差
|
UWB/LiDAR/里程计联合优化建图
|
研究总结
室内自主移动机器人 (AMR) 的感知系统是其成功导航的核心,但单一传感器 (如LiDAR受透明物体干扰、视觉相机受光照变化影响、信标系统部署成本高) 均存在固有局限,难以独立应对复杂动态场景。因此,多传感器融合通过优势互补 (如IMU辅助视觉、超声补偿LiDAR盲区) 成为提升定位、建图及避障鲁棒性的必然选择。未来核心研究方向聚焦于三点:
1. 多源信息融合:单一传感器由于其固有的局限性,难以满足复杂场景中的导航需求。因此,多传感器融合成为室内自主移动机器人研究与发展的关键方向。通过为感知系统提供更全面的环境信息,多传感器融合能够提升定位、建图和障碍物检测的准确性、效率及稳定性,进而为决策系统提供更准确和完整的信息,使移动机器人更好地适应复杂环境,更高效、更稳健地完成导航任务。
2. 灵活高效的优化策略:当移动机器人在多样化的复杂动态环境中运行时,传感器所获得的观测信息中存在大量未知的模型噪声和粗糙数据。为确保AMR系统的效率、稳定性和精度,需要根据具体环境及其动态变化研究合适的优化策略。此外,优化过程中涉及诸多复杂的非线性运算。为提高处理大规模或多模态数据时的计算效率,可采用并行计算、分布式计算等方法。
3. 与神经网络的集成:由于神经网络有助于增强移动机器人系统的稳定性,将其与移动机器人相结合已引起广泛关注。此外,神经网络的自学习能力能够应对传感器干扰和外部环境因素的影响,从而提升定位抗干扰能力。然而,目前基于神经网络的算法在多样化室内场景中的定位仍存在局限。在使用同一神经网络算法时,移动机器人在不同环境中的误差较大。今后研究应探索融合更多类型的传感器,并应用更复杂的神经网络结构,以满足不同室内环境中的导航需求。随着大语言模型的出现和芯片技术的进步,基于神经网络的方法预计将在未来得到迅速发展。
期刊介绍
主编:Vittorio M. N. Passaro, Politecnico di Bari, Italy
期刊涵盖所有传感器科学和技术研究领域,例如物理传感器、智能传感器、传感网络、生物传感器、化学传感器、雷达、可穿戴电子设备和先进的传感材料及其在物联网、工业、农业、环境、遥感、导航、通信、车辆、成像、生物医药等领域的应用。目前期刊已被SCIE (Web of Science)、PubMed、Ei Compendex、Scopus等数据库收录。
|
2024 Impact Factor
|
3.5
|
|
2024 CiteScore
|
8.2
|
|
Time to First Decision
|
19.7 Days
|
|
Acceptance to Publication
|
2.4 Days
|
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。