|
|
|
|
|
FME文章荐读 | 基于平面对称7R连杆机构的伞式机械展开式气动减速装置设计 |
|
|
论文标题:Design of umbrella-like mechanically deployable aerodynamic decelerators on the basis of plane-symmetric 7R linkages
期刊: Frontiers of Mechanical Engineering
作者:Zijie CHEN, Hongwei GUO, Chuang SHI, Rongqiang LIU, Zongquan DENG
发表时间:15 Jun 2025
DOI:10.1007/s11465-025-0829-3
微信链接:点击此处阅读微信文章
随着深空探测任务向更复杂的行星环境拓展,低弹道系数可展开减速装置已成为进入、下降与着陆(EDL)系统的核心组件。传统刚性气动外壳因质量大、弹道系数高,难以满足现代任务对轻量化和高效减速的需求;而充气式减速装置(IAD)虽能降低弹道系数,却存在结构复杂、热防护能力有限(耐热温度≤190℃)及空气泄漏等问题。机械展开式减速装置(MDAD)虽整合了热防护系统(TPS)与展开机构,但TPS变形引发的稳定性问题尚未根本解决,现有设计如ADEPT技术仍面临可靠性挑战。
《Frontiers of Mechanical Engineering》2025年第20卷第3期的一篇题为"Design of umbrella-like mechanically deployable aerodynamic decelerators on the basis of plane-symmetric 7R linkages"的研究论文,提出了基于平面对称7R连杆机构的伞式机械展开式气动减速装置(MDAD)创新设计方案。
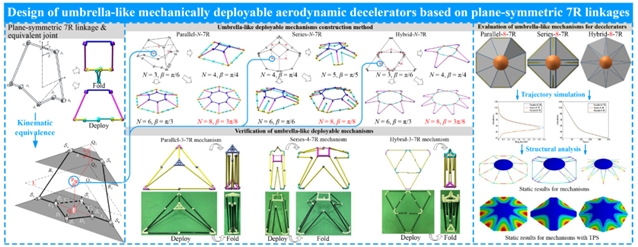
本研究装置通过伞型开合机制实现高效气动减速与结构锁定,主要由可展开机构、热防护系统(TPS)和载荷舱三部分构成。其中,多组平面对称7R连杆的协同运动显著提升了系统刚度,同时简化了控制逻辑;TPS与机构的集成设计则确保了气动压力下表面张力均匀分布,有效解决了传统TPS变形导致的稳定性问题。
研究基于指数积(PoE)方法构建了7R连杆机构的运动学模型,通过坐标系变换矩阵对各连杆相对运动进行精确描述。在此基础上创新提出等效关节法,将复杂机构转化为虚拟关节模型,显著降低了动态特性分析的计算复杂度。结合奇异性理论深入分析,明确了连杆自锁特性与运动边界条件的量化关系,为机构优化设计提供了关键理论支撑。
在此基础上,研究受到电路的连接方式的启发,提出了并联式(P-N-7R)、串联式(S-N-7R)以及混联式(H-N-7R)三种伞式机构的构建方式:串联式通过7R单元中的关节共用机制,得到了一系列的单自由度机构,通过三环机构实物模型(P-3-7R)与运动学仿真验证了系列机构的单自由度特性;串联式(S-N-7R)构建了一系列类球面连杆机构,并基于四环实物模型(S-4-7R)与运动学仿真验证了其球面特性并给出了其自由度计算通式;混联式(H-N-7R)基于7R连杆和一般关节构建了一系列具有单环机构运动特性的机构,并通过H-3-7R机构的实物模型与运动学仿真验证了其运动特性,并给出了自由度定义。
研究基于火星大气模型构建了火星大气进入三自由度轨道姿态运动模型,评估了不同构型(P-8-7R、S-8-7R、H-8-7R)的进入轨道参数;同时还基于有限元方法,评估了上述三种构型受气动载荷的应力分布与挠曲变形。最终,串联式(P-8-7R)因在气动性能、结构刚度及TPS支撑能力上的综合优势被选定为候选方案。数据显示,其在火星进入过程中阻力提升11.7%,结构最大应力降低45.8%。本研究首次将多环伞式机构引入MDAD设计,突破了传统机构复杂性的限制,为深空探测器热防护与气动减速的一体化设计提供了新思路,具有显著的工程应用前景。
关键词
机构设计;机械展开式气动减速装置;平面对称7R连杆机构;伞式构型
引用
Zijie CHEN(陈子杰), Hongwei GUO(郭宏伟), Chuang SHI(史创), Rongqiang LIU(刘荣强), Zongquan DENG(邓宗全). Design of umbrella-like mechanically deployable aerodynamic decelerators on the basis of plane-symmetric 7R linkages. Front. Mech. Eng., 2025, 20(3): 17
https://doi.org/10.1007/s11465-025-0829-3
扫描二维码阅读原文
团队介绍

空天折展与变形机构实验室依托哈尔滨工业大学宇航空间机构及控制研究中心,主要研究方向有空间大型折展机构、飞行器变体机构、空间变构型机构等。研究团队以我国航空航天重大工程需求为牵引,围绕空天折展与变形机构开展前沿基础理论创新与关键技术攻关工作,旨在打造具有国际影响力的科学研究与人才培养基地。研究团队现有成员60余人,其中教授4人、青年教师3人、博士生25人、硕士生22人、工程设计及教辅人员8人。研究团队主持国家自然科学基金重大项目1项、基金重点项目(含联合基金)3项,承担载人航天型号产品研制、民用航天预研项目、国家重点研发计划课题等,年均科研经费2000余万元。
作者介绍

陈子杰,博士研究生。主要从事空间折展机构设计、机器人机构学与结构力学仿真方面的研究工作。目前已发表学术论文9篇,其中SCI期刊论文4篇,包含中国科学院1区顶刊3篇,2区1篇;国际顶级会议论文3篇,国内会议论文2篇。

史创,副教授,博士研究生导师。主要从事空间折展机构设计、机构构型综合、机构动力学建模与仿真方面的研究工作。获省部级科技一等奖1项(排5),陕西省机械工程学会科学技术一等奖1项(排3);出版学术专著1部(第3作者),发表SCI/EI论文40余篇,授权国家发明专利30余项。主持国家自然科学基金青年项目、国家博士后基金面上项目等纵向项目6项,横向项目20余项。

郭宏伟,长聘教授、博士生导师。主要从事空间折展变形机构与控制、飞行器智能变构型结构与机构研究,国家自然科学基金委基础科学中心项目骨干成员,主持国家自然科学基金重大项目课题、面上项目、载人航天型号项目等20余项;获国家技术发明二等奖1项、获省部级技术发明一等奖5项;黑龙江省青年科技奖;出版学术专著2部,发表学术论文150余篇,获授权国家发明专利60余项。任中国机械工程学会-空间机构学专业委员会副总干事、常务委员,国际机构学与机器科学联合会 IFToMM 中国委员会委员,中国空间科学学会-空间机电与光学专业委员会委员等。担任国际期刊ASME JMD/JMR 、MMT、Acta Astronautica等审稿人。

刘荣强,长聘教授,博士生导师,宇航空间机构及控制研究中心副主任。从事空间折展机构、变构型机构与缓冲吸能技术等研究,主持国家自然科学基金重点项目、面上项目、民用航天等项目20余项。获得国家技术发明二等奖2项(排名第2和第4),省部级科技奖励5项。2008年荣获黑龙江省优秀留学回国人员报国奖。发表学术论文200余篇,出版学术专著2部,授权发明专利50余项。现任中国机械工程学会空间机构分会副主任委员、中国宇航学会空间太阳能电站专业委员会副主任委员、深空探测专业委员会委员、中国空间学会空间机电与空间光学专业委员会委员,中国振动工程学会冲击防护技术专业委员会委员等。
精彩推荐
1.FME文章荐读 | 超声振动辅助磨削连续纤维增强金属基复合材料的去除机理研究:实验与仿真模型
2.FME文章荐读|考虑全状态约束与扰动的气动肌肉系统自适应模糊动态表面控制
3.FME文章荐读|基于机器学习的机构运动学分析与综合方法综述
4.FME文章荐读 | 变工况下轴承故障诊断的基于加权DJP-MMD的深度迁移度量学习方法
5.FME文章荐读 | 冰壶比赛中新型六足冰壶机器人投掷冰壶的分析与解决方案
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






