2026年被认为是具身智能场景落地的元年。在机器人“飞檐走壁”的当下,它们何时才能走入真实场景去干活儿?总台央视记者张春玲通过深度调研以及行业分析,为您拆解一下具身智能技术仍需突破的几大难点。
从飞檐走壁到下场干活儿,不知道你是否也有这个疑问,具身智能机器人何时能走向真正的场景落地?
近日,宇树科技的一份招股书从一个侧面折射出行业的发展现状——技术路线尚未突破,通用机器人的消费级市场尚未形成刚需。这份报告背后,我们机器人行业依然面临着几大难题。
第一,数据不足。宇树说要把近一半的募资投向模型和数据,这里面就和机器人学习动作有关系。像我们从小就是在无数的真实场景里反复地学习、练习,但是机器人没有这样的成长过程,它只能靠海量的数据去“刷题”,靠“见多识广”去弥补自己能力。而如果想让机器人真正变得更通用、更灵活,能在不同场景里完成更多任务,行业认为,所需数据量至少要达到百万级小时。
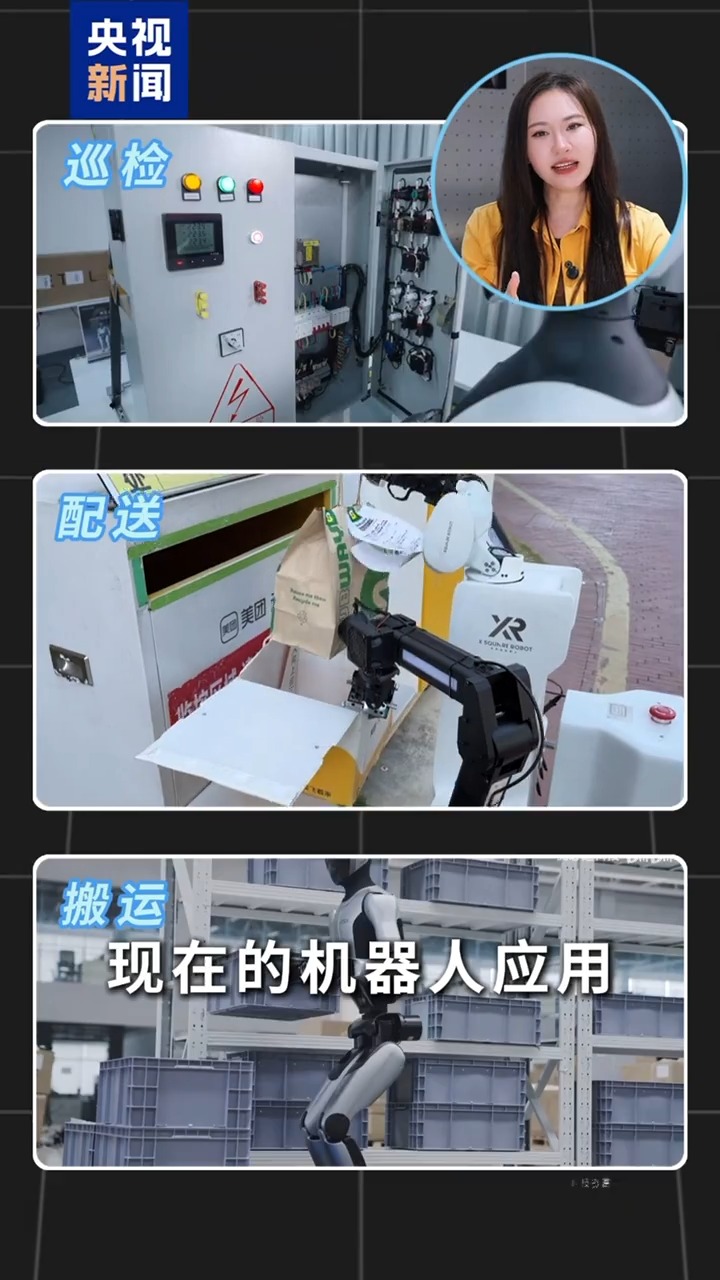
第二,场景不深。宇树说,当前人形机器人应用生态和市场培育周期很长。的确,现在的机器人应用看起来似乎已经不少了,但是在那些真正高频、刚需的真实生活场景里,比如大家期待的干家务,机器人依旧难以胜任。归根结底,就是机器人的泛化能力还不足。在家庭这种环境各异、突发状况频发的场景当中,机器人的应变能力、稳定性和安全性都还有待提升。
第三,路线不清。今天大家想让机器人要变聪明,怎么做?都在试。行业内比较主流的方案有“世界模型”,就是教会机器人物理规律,让它凭常识决策行动。有“VLA”模型,是把机器人的视觉、语言和动作打通,让机器人“看到”之后就能“理解”,“理解”之后就能“行动”。此外还有强化学习、分层框架等等方案。这就好像在一片黑森林里摸索,方向很多,但哪条路能最快走向真实可用,现在还没有答案。
北京智源人工智能研究院院长王仲远:我们先会在特定的场景下采集足够多的数据集,训练出一些专用的模型,这些模型能够使得机器人真正地干起活,形成商业的闭环。在这个过程中累积更多的数据,打磨我们的硬件本体,让它更加可靠,更加安全,更加持久耐用。这些都需要我们有更充足的耐心。
2026年,机器人将会越来越多地走入场景落地之路,开始在真实世界打工、学习、成长、进化。虽然我们无法去预计那个爆发的奇点到底在哪里,但是在全行业的努力探索下,走着走着,也许自然就会有了答案。
(总台央视记者 张春玲 李峻 吴昊)
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。