跳跃是动物在复杂环境中实现高效移动的关键策略,兼具快速跨越障碍、高能效与转向灵活等优势。跳甲是鞘翅目叶甲科萤叶甲亚科的一类昆虫,因其惊人的爆发力和稳定的跳跃姿态,是仿生跳跃机器人设计的理想生物原型。
中国科学院动物研究所葛斯琴团队联合中山大学吴嘉宁团队及美国佐治亚理工学院David Hu教授团队,以蓟跳甲(Altica cirsicola)为研究对象,利用高速摄像技术解析了其在倾斜平台上的跳跃方式(图1)。研究结果显示,蓟跳甲的跳跃可分为三种模式:(1)不展翅模式:仅依靠腿部力量完成跳跃,后翅不展开,虫体在空中存在俯仰和翻滚;(2)展翅模式:起跳时展开后翅,以飞行方式运动,空中无翻滚;(3)中间模式:跳跃前半程仅依靠腿部力量,后翅不展开;后半程展展翅并挥翅以稳定空中姿态。进一步分析研究分析表明:在30°倾斜平台上使用不展翅模式跳跃过程中,蓟跳甲产生的旋转能为162.8 μJ,仅占总动能9.5×103μJ的1.7%,几乎可以忽略不计,这意味着它几乎将全部的力量用于推进,这一发现为仿生跳跃机器人的能量传递设计提供了重要依据。相关成果发表于《Journal of Comparative Physiology A》。
中国科学院动物研究所宗乐博士为第一作者,中山大学航空航天学院吴嘉宁副教授为共同第一作者,中国科学院动物研究所葛斯琴研究员与美国佐治亚理工学院的David Hu教授为共同通讯作者。该研究得到了科技部第三次新疆综合科学考察(No.2021xjkk0605)的资助。
文章链接:https://doi.org/10.1007/s00359-022-01567-w
为突破传统跳跃机器人受限于执行器能量密度的瓶颈,葛斯琴团队与山东大学张国腾教授团队合作,以蓟跳甲为生物模型,创新性地研发了一种燃爆推进系统(图2)。该系统采用高纯度氧气(99.5%)和丁烷(99.5%)混合气体作为能源,通过电磁阀精确控制气体混合比例,并由高压点火器瞬间触发释放化学能,驱动活塞带动仿生腿进行跳跃运动,实现相当于自身体长1.67倍的垂直跃升。与常规弹簧驱动相比,这种“化学能+仿生结构”的协同方式,大幅提升了单位质量的输出功率。
研究团队还基于蓟跳甲的腿部形态结构,设计了可消除力传递死区的仿生结构,并通过有限元模拟验证了燃爆驱动的可行性(图3)。仿真中采用等效TNT方法量化冲击力,结果显示该系统能有效将化学能转化为跳跃动能。这种“仿生+燃爆”的协同设计为动态机器人在废墟救援、行星探测等复杂环境中的移动提供了新思路。未来通过优化能源效率与控制算法,有望进一步拓展其应用场景。相关成果以“A Flea Beetle-Inspired Combustion-Powered Jumping Robot”为题发表于《Journal of Bionic Engineering》。
中国科学院动物研究所博士研究生孙宗晖为第一作者,山东大学控制科学与工程学院张国腾教授、中国科学院动物研究所黄正中助理研究员和葛斯琴研究员为共同通讯作者,该研究得到了国家自然科学基金面上项目(No.32270460)的资助。
文章链接:https://doi.org/10.1007/s42235-025-00726-4
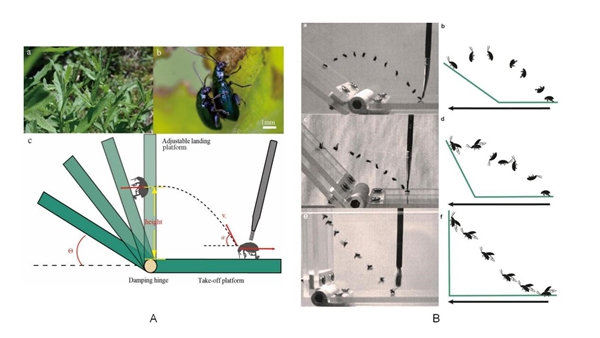
图1A.蓟跳甲及动力学参数示意图;B.跳甲的三种跳跃模式

图2A.跳甲的生物模型;B.跳跃机器人设计图
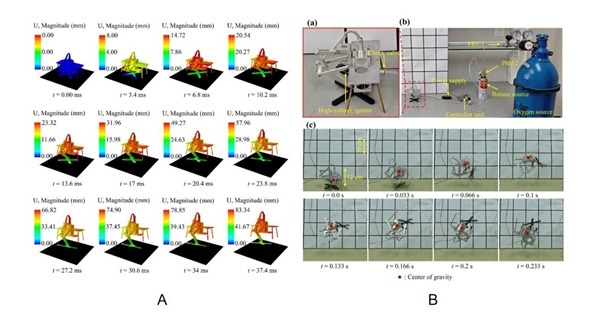
图3A.模拟跳跃机器人的位移结果;B.跳跃机器人实验图
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






