|
|
|
|
|
基于变分数阶模糊滑模控制器的永磁同步电机转速控制 | MDPI Actuators |
|
|
论文标题:Speed Control of Permanent Magnet Synchronous Motor Based on Variable Fractional-Order Fuzzy Sliding Mode Controller
论文链接:https://doi.org/10.3390/act14010038
期刊名: Actuators
期刊主页:https://www.mdpi.com/journal/actuators
一、引言
低速大转矩执行器在采矿、冶金、船舶制造等工业领域应用广泛,永磁同步电机因结构紧凑、功率密度高、运行可靠等优点,成为这类应用的主流选择。实际驱动系统中,永磁同步电机通常与机械减速器配合使用,但减速器会带来控制迟滞、温升、能耗增加和运行噪声等问题。若要从驱动系统中省去减速器,实现电机直接驱动,就必须对电机转速进行高精度控制。
滑模控制因对参数变化和外部扰动不敏感、响应快速且实现简单,成为非线性鲁棒控制的有效手段。近年来,分数阶滑模控制通过在滑模面中引入分数阶算子,进一步提升了系统的响应速度和抗干扰能力。变分数阶算子是分数阶算子的扩展,其微分和积分的阶次可随系统状态或时间动态变化,在描述复杂系统和提升控制性能方面具有独特优势。将变分数阶引入滑模控制,有望进一步增强控制系统的精度与鲁棒性。
基于此,本文设计了一种变分数阶模糊滑模控制器,用于永磁同步电机转速控制。这是首次将变分数阶方法应用于永磁同步电机控制领域。同时,针对电机运行中部分状态变量难以直接测量的问题,引入自适应模糊规则,对系统不确定性和未知状态进行在线补偿。本文通过仿真和实物实验验证了所提控制器的有效性,并与传统PID控制器和定阶模糊滑模控制器进行了系统对比。
二、材料、方法与结果
1. 控制器设计
本文以转速误差及其变化率为状态变量建立系统模型。提出的变分数阶滑模面,其阶次随系统状态动态变化:趋近初期采用较小阶次加快响应,接近滑模面时增大阶次减小超调。控制律由等效控制和切换控制组成。针对状态不可测和不确定性未知的问题,引入模糊系统在线估计集总不确定性。Lyapunov理论证明了系统的稳定性。
2. 仿真与实验
在空载阶跃响应中,PID超调12%、调节时间0.12秒;定阶模糊滑模控制超调5%、调节时间0.08秒;所提方法超调小于2%、调节时间0.05秒。突加负载时,PID转速跌落45转/分;定阶模糊滑模控制跌落25转/分;所提方法跌落12转/分。参数摄动下,PID出现明显振荡,定阶模糊滑模控制性能下降,所提方法超调仍小于3%。实验平台(图1)验证结果与仿真一致。
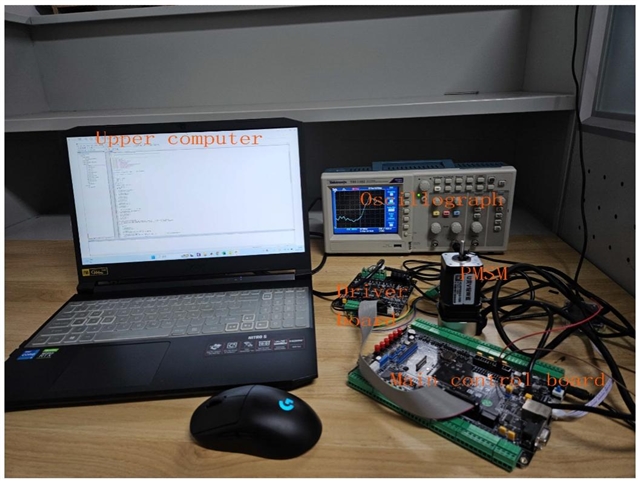
图1. 实验平台
三、讨论
变分数阶滑模面的优势在于阶次动态可调,兼顾快速响应与小超调。模糊逼近无需不确定性上界信息,可有效补偿未知扰动并减小抖振。与PID和定阶模糊滑模控制相比,所提方法在响应速度、超调量、抗扰动能力上均表现最优。不足在于计算复杂度较高,未来可拓展至电流环并优化阶次自适应律。
四、结论
本文针对永磁同步电机转速控制问题,设计了一种变分数阶模糊滑模控制器。该控制器融合了变分数阶滑模面和模糊自适应逼近两项技术:变分数阶滑模面通过动态调整阶次,使系统在趋近阶段和滑模阶段均获得良好的动态性能;模糊系统用于在线逼近系统的不确定性和未知状态,增强了系统的鲁棒性。Lyapunov稳定性理论证明了闭环系统的全局稳定性和有限时间收敛性。
仿真和实验结果表明,与PID控制器和定阶模糊滑模控制器相比,所提控制器在转速响应速度、超调量、抗负载扰动能力以及对参数摄动的鲁棒性方面均具有明显优势。该控制器为永磁同步电机高精度转速控制提供了一种有效解决方案,在要求低速大转矩且无减速器直接驱动的应用场景中具有良好的应用前景。
引用格式:
Chen, L.; Liu, H.; Cao, Z.; Lopes, A.M.; Yin, L.; Liu, G.; Chen, Y. Speed Control of Permanent Magnet Synchronous Motor Based on Variable Fractional-Order Fuzzy Sliding Mode Controller. Actuators 2025, 14, 38.
Actuators期刊介绍
主编:Kenji Uchino, The Pennsylvania State University, USA
Norman M. Wereley, University of Maryland, USA
Actuators期刊涵盖与执行器和控制系统相关的科学与技术,期刊下设包括执行器材料、航空执行器、机器人执行器、控制系统等10个专题,为执行器和控制系统的科学和技术提供了一个先进的论坛。期刊已被Scopus、SCIE (Web of Science) 等数据库收录。
2024 Impact Factor:2.3
2024 CiteScore:4.3
Time to First Decison:20.9 Days
Acceptance to Publication:2.7 Days
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






