|
|
|
|
|
北京冬奥会六足冰壶机器人:仿生设计与精准控制的科技实践 Engineering |
|
|
论文标题:Mechanism Design and Motion Planning of a Hexapod Curling Robot Exhibited During the Beijing 2022 Winter Olympics Games
期刊:Engineering
DOI:https://doi.org/10.1016/j.eng.2023.10.018
微信链接:点击此处阅读微信文章

在 2022 年北京冬奥会上,上海交通大学高岳副教授(电子信息与电气工程学院)与高峰教授(机械系统与振动全国重点实验室)团队研发的六足冰壶机器人备受瞩目。这款融合仿生机械设计与智能控制技术的 “冰上选手”,其核心成果以“Mechanism Design and Motion Planning of a Hexapod Curling Robot Exhibited During the Beijing 2022 Winter Olympics Games”(北京 2022 年冬奥会六足冰壶机器人的机构设计与运动规划)为题,发表于中国工程院院刊《Engineering》,深度解析了机器人技术在冬季运动中的创新实践。
一、仿生机构设计:从人类动作到机械结构的精准复现
这款六足冰壶机器人重 75 公斤,体长 0.6 米,采用独特的腿部模块化设计,可实现行走与投掷两种模式的平滑切换。其前腿和中间腿小腿长度为 0.3 米,后腿延长至 0.5 米以增强踢击动能,21 个电机分布于髋部、膝盖和身体,分别驱动腿部运动、冰壶旋转和机械臂动作。
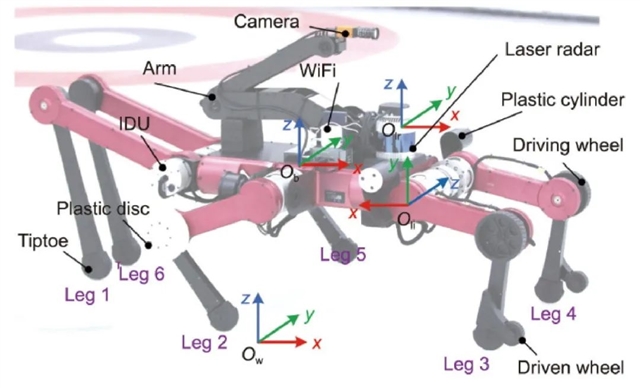
图1. 六足步行机器人。
机器人的核心设计灵感源于人类投掷冰壶的动作链:后腿模拟橡胶鞋提供反作用力踢击起滑架,前腿通过驱动轮与从动轮形成四边形包络抓取冰壶,并通过塑料圆柱体支撑机身。中间腿则配备塑料圆盘,在滑行阶段提供低摩擦支撑,投掷结束后切换为橡胶脚尖实现快速制动。这种多功能腿部设计,使得机器人既能以 3-3 步态稳定行走,又能在投掷时通过形态变换(如中间腿从 L 形到反 L 形的切换)调整质心,确保动作连贯性。
二、运动规划与建模:多阶段动态控制的科学解析
科研团队建立了三阶段运动模型以精准预测冰壶轨迹:
瞄准建模:通过激光雷达与摄像头组成的视觉系统定位目标,机器人绕后腿中心点旋转调整方向,旋转角度 θc 通过坐标变换公式计算,确保瞄准精度。
组合系统动力学建模:在踢击加速(阶段 1)、摩擦滑行(阶段 2)、推击分离(阶段 3)过程中,采用七阶多项式插值生成实时位置,结合能量守恒方程计算机器人与冰壶的速度变化。关键参数如踢速 vk、推速 vp 通过等效摩擦系数 μequ(初始值 0.01)和前后摩擦比 e(初始值 30)确定。
冰壶滑行建模:提出 “前后摩擦不对称模型”,将冰壶分为前后两部分,假设质量集中于滑行带交点,通过摩擦系数比 e 和等效摩擦系数 μequ 解析侧向与前进加速度,成功模拟冰壶旋转引发的横向偏移现象。
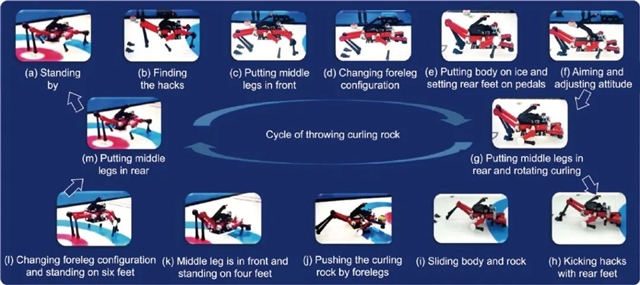
图2. 投掷冰壶循环:机器人在六足状态下寻找起滑架,在四足状态下投掷冰壶。
三、实验验证:从模拟收敛到人机竞技的性能评估
在模拟实验中,五组投掷任务的误差通过 PI 控制器逐步收敛:初始估计偏差下,误差从 3.6 米快速降至 0.7 米,最终稳定在 0.2 米。实验阶段,机器人在冰面完成行走 - 投掷循环,通过反馈控制将实际误差收敛至 1.105 米,接近轮椅冰壶运动员的水平(约 1 米)。

图3. 冰壶投掷场景?(a)两名健全运动员正在投掷,其中一名运动员与冰壶一起滑动,另一名运动员则准备用冰刷清扫冰面;(b)两名轮椅运动员 正在投掷,其中一名运动员用细杆推动冰壶,另一名运动员则瞄准目标;(c)六足冰壶机器人准备投掷。
人机竞赛环节中,机器人与健全运动员、轮椅运动员分别对战。尽管因缺乏冰面擦拭环节输给健全运动员,但凭借稳定的投掷精度以 1 分优势战胜轮椅运动员。实验数据显示,机器人投掷的冰壶停止点与目标点的偏差在反馈控制下显著缩小,验证了其控制系统的环境适应性。
四、技术价值与应用前景
相较于传统轮式冰壶机器人,六足设计避免了车轮摩擦对冰面的损伤,其仿生动作链更贴近人类投掷逻辑。论文指出,该机器人可作为制冰师的辅助工具,通过多次投掷检测冰面摩擦系数;也可用于运动员训练,提供标准化的投掷参照。未来研究方向包括优化形态转换效率、开发配套擦拭机器人,以及继续研究冰壶与冰面相互作用的第一原理模型,以预测冰壶轨迹。
这项研究不仅展现了机器人技术在极端环境下的应用潜力,更通过跨学科协作,为冬季运动的科学化训练与场地维护提供了新范式。随着人工智能与机械设计的深度融合,类似的仿生机器人或将在更多体育场景中实现技术突破,推动智能体育装备的革新。
文章信息:
Mechanism Design and Motion Planning of a Hexapod Curling Robot Exhibited During the Beijing 2022 Winter Olympics Games
北京2022年冬奥会六足冰壶机器人的机构设计与运动规划
作者:
尹科, 高岳*, 高峰*, 陈先宝, 赵越, 肖宇光, 孙乔, 孙竞
引用:
Ke Yin, Yue Gao, Feng Gao, Xianbao Chen, Yue Zhao, Yuguang Xiao, Qiao Sun, Jing Sun. Mechanism Design and Motion Planning of a Hexapod Curling Robot Exhibited During the Beijing 2022 Winter Olympics Games. Engineering, 2024, 35(4): 15–31
开放获取论文:
https://doi.org/10.1016/j.eng.2023.10.018
更多内容
华中科技大学团队提出人机协作新框架,解锁机器人装配新技能
机器人技术助力深海生态系统监测与恢复
湖南大学钟杭团队:新概念空中机器人的现状、挑战与前景
新研究提出群体交互场概念,助力无人系统理解行人意图
Engineering征稿启事:人工智能赋能工程科技
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






