|
|
|
|
|
FEM 城市自动驾驶交通全局调度模式的框架、模型和算法 |
|
|
论文标题:Framework, model and algorithm for the global control of urban automated driving traffic
期刊:Frontiers of Engineering Management
作者:Kunpeng LI, Xuefang HAN, Xianfei JIN
发表时间:15 Dec 2024
DOI:10.1007/s42524-023-0294-9
微信链接:点击此处阅读微信文章
作者:李昆鹏1,韩雪芳1,金险飞2
单位:
1. 华中科技大学 管理学院,武汉 430074;
2. Sabre Inc, Southlake TX 76092, USA
引用:
Kunpeng LI, Xuefang HAN, Xianfei JIN. Framework, model and algorithm for the global control of urban automated driving traffic. Frontiers of Engineering Management, 2024, 11(4): 592–619 https://doi.org/10.1007/s42524-023-0294-9
文章链接:
https://journal.hep.com.cn/fem/EN/10.1007/s42524-023-0294-9
https://link.springer.com/article/10.1007/s42524-023-0294-9
摘要:
近年来,自动驾驶引起了广泛关注。已有大量研究聚焦于自动驾驶技术发展、社会接受意愿等方面,但有关未来自动驾驶环境下城市交通管控模式的研究仍处于起步阶段。随着自动驾驶技术的发展,城市交通的管控逻辑也将发生重大变革。目前,无论是传统手动驾驶还是自动驾驶,都采用局部调度模式,即根据车辆状态和周围环境做出驾驶决策。这种模式并不能充分发挥自动驾驶在优化路网资源、提升交通效率方面的潜在效益。为应对自动驾驶的日益普及,交通局有必要从全局视角出发,积极探讨城市交通的管控模式及方法。因此,本文创新性地提出一种城市自动驾驶交通全局调度模式。该模式的核心理念是通过车路协同,对路网内所有的自动驾驶车辆进行集中调度,从而优化交通流量。同时本文详细阐明了全局调度模式的运作机制及流程。此外,考虑到大规模路网的复杂性,本文提出大规模路网划分为多个管理子区。基于此,本文定义了一个自动驾驶车辆全局调度问题。为求解该问题,建立了一个混合整数线性规划模型,同时提出了一种改进的 A*算法。实验结果表明:①该算法始终能快速提供高质量的解决方案;② 全局调度模式显著减少了交通拥堵并公平分配了路网资源。综上,本文提出了一种可行且有效的新型交通管控模式,可大幅提高城市自动驾驶交通的效率。
关键词:自动驾驶;城市交通控制;全局调度模式;自动驾驶车辆路径规划,A*算法
1.引言
作为21世纪极具创新性和突破性的新技术之一(Paden 等, 2016; Sener , 2019; Golbabaei 等, 2020; Narayanan 等, 2020) ,自动驾驶有望重塑汽车行业,乃至引领交通出行和城市建设的全面变革(Fagnant 和 Kockelman, 2015)。新世纪以来,自动驾驶对未来交通出行与城市发展的巨大潜在效益,引起了广泛关注(Milakis 等, 2017; Morando 等, 2018; Fafoutellis 和 Mantouka, 2019)。一大批传统汽车制造企业及重要一级供应商、互联网巨头和科研机构对相关技术展开大量探究(Greenblatt 和 Shaheen, 2015; Xu 等, 2018a)。以谷歌、百度、华为、特斯拉为代表的大型科技企业,直接推动了5G通信、云计算、物联网、高精度地图等自动驾驶更深层技术的裂变式发展。越来越多的低等级(L1-L3)自动驾驶车辆进入路网,高等级(L4、L5)自动驾驶车辆逐渐迈入场景测试阶段(Tesla, 2016; Google, 2020)。全自动驾驶在未来几十年有望实现(Piao 等, 2016; Cascetta 等, 2022)。自动驾驶将极大地影响城市交通系统,政府管理者、交通专家和学者等需要探索新的方法来管理自动化交通系统(Lipson 和 Kurman, 2016)。然而,现有研究主要集中技术发展、社会接受意愿等方面,对城市自动驾驶交通管理的探讨十分有限。因此,不同于已有文献,本文主要研究两个问题:①随着自动驾驶的普及,未来城市交通的管控模式将会如何变化?② 在新的管控模式下,是否有优化交通的创新方法,会对城市交通产生多大效益?
城市交通控制模式主要分为两种:局部调度模式和全局调度模式。目前,尽管少量低等级自动驾驶车辆逐渐融入路网,但城市交通仍然以采用局部调度模式的人类驾驶为主。局部调度模式也即车辆根据起终点信息,以及对周围小范围环境的感知结果,以单车最优为目的自主决策行驶路径以及轨迹规划(如换道、变速等)。当前的车路协同(VIC)方法也属于局部调度模式。然而,这种模式往往会造成路网资源分配不均,是导致当前城市交通拥堵的主要原因之一。相反,全局调度则是基于某区域内的全部车辆信息和道路实时状况,集中管控、统一调度区域内的所有车辆。这种模式通过将车辆控制权集中在交通部门,可以更大程度发挥自动驾驶对城市交通的潜在效益,实现由驾驶员行驶决策而导致的被动路网资源分配,转向基于全局系统决策的主动路网资源分配,最终演变为车辆与路网交互的协同分配。
自动驾驶将不可预测、不可控制的人类行为转化为可预测、可控制的系统决策(Mordue 等, 2020),为全局调度的实现提供了技术支持。尽管城市自动驾驶交通全局调度模式尚未有人研究,但类似的概念和思想已在其他场景中经得到了应用。一个直观的案例是智能仓库中自动导引小车(Automated Guided Vehicles, AGV)调度系统,如亚马逊的KIVA系统。在这种完全封闭的自动化运输环境中,智能仓库可看作路网,AGV即路网中的自动驾驶车辆。在此场景中,所有AGV的路径和驾驶信息都统一由仓库调度系统收集和决策。仓库管理者主要负责引入、布局和维护系统和设施,以及改善调度算法。相较于传统人工作业仓库,这种自动化全局调度系统将仓库运作效率提升了2-4倍(Wulfraat, 2012)。
在城市自动驾驶交通背景下,车辆全局调度问题可概括为:利用交通管控平台为多辆自动驾驶车辆规划无碰撞驾驶路径。这种方法旨在基于路网的当前状态来优化整体路网。值得注意的是,自动驾驶车辆全局调度问题(AVGSP)有两个不同于以往研究的关键点:首先,它需要建立新的交通运行逻辑、确定参与主体并明确各自的责任。其次,必须实施明确合理的交通管制规则,以应对多车冲突等特殊情况。全局调度模式与当前的局部调度模式在基础设施、驾驶规则、管控方式、政策法规方面,有很大不同。因此,全面探讨该模式的交通运行框架、流程和管控规则至关重要。
预计在未来几十年中,创新的交通模式和车辆将在现代化城市交通系统发挥重要作用(Gao 等,2023 )。不少国家已经将打造融合自动驾驶的智能交通系统(ITS),作为城市交通发展的重要战略方向。本文的主要贡献如下:①提出了一种基于车路协同的新型城市自动驾驶交通全局调度模式,并阐明其运行机制和规则。②引入了“路网分区--子区域内车辆全局调度”策略,并在此框架内定义自动驾驶车辆全局调度问题。③为自动驾驶车辆全局调度问题建立了一个混合整数线性规划模型(MILP),并引入有效不等式以提升模型的求解能力。实验结果表明,这些不等式平均缩短了61%的求解时间。④将自动驾驶车辆全局调度问题作为最短路径问题的变种之一,开发了一种改进的 A* 算法(MASA),并通过与MILP和传统A*算法的比较,评估了本文算法的有效性。结果表明,所提出的算法能在短时间内有效获得最优或近似最优解。此外,不同自动驾驶车辆渗透率的实验结果表明,全局调度模式显著提高了交通效率并平衡了路网资源分配。
本文共分七节。第2节回顾了相关研究。第3节阐述了城市自动驾驶交通全局调度模式的运行机制和规则。第4节为 AVGSP建立了一个MILP模型。第5节提出了一个改进的A* 算法。第6节讨论了实验结果。最后,第7节总结并提出了未来潜在的研究方向。
2.文献综述
自动驾驶已成为21世纪全球的一个重要现象(Czech, 2018),已有大量研究关注这一主题。本文系统回顾了从2012年1月到2022年12月期间,在Web of Science数据库中发布的约1000篇与之高度相关的论文。检索标准包括“自动驾驶汽车”、“自动化车辆”、“无人驾驶”、“自动驾驶”和“自动化驾驶”等关键词,采用VOS Viewer创建了一个网络图,其中考虑了出现频次高于五次的关键词,并设定阈值为38。在3979个关键词中,本文选择了出现频率最高的300个关键词。如图1所示,现有文献可以分为三个子领域。
(1)大部分文献针对自动驾驶技术展开研究。这一领域涉及多个方面,例如自动驾驶车辆定位(Zheng 等, 2019);碰撞避免策略(Guo 等, 2019);驾驶行为控制,包括变道、换挡和转弯(Khattak 等, 2020);交叉口调度和局部路径规划(Lam 等, 2016)。此外,相关研究还包括测试场景的构建(Shao 等, 2019)以及硬件和软件组件的设计(Fayazi 等, 2019)。
(2)与政策、公众接受度和接受性相关的研究(Panagiotopoulos和Dimitrakopoulos, 2018;Rosell和Allen, 2020;Pigeon等, 2021)是另一重要研究领域。这类研究主要集中于现阶段民众对自动驾驶车辆的接受情况(Gkartzonikas和Gkritza, 2019)、影响公众接受度的关键因素(Kyriakidis等, 2015;Zhang等, 2019;Golbabaei等, 2020;Rezaei和Caulfield, 2020;Janatabadi和Ermagun, 2022)及相关主题。
(3)关于自动驾驶实施方法的研究,包括单车智能(IVD)和车路协同(VIC)(Bansal和Kockelman, 2017;Ma, 2020)。此外,部分学者们还评估了自动驾驶对交通效率、交通法规、城市发展等方面的影响(Fagnant和Kockelman, 2015;Duarte和Ratti, 2018)。
然而,据我们所知,城市自动驾驶交通的控制模式尚未得到广泛研究。
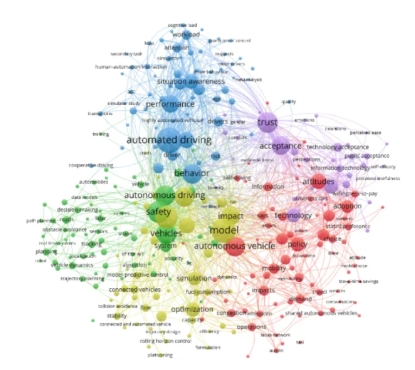
图1. 自动驾驶中出现频率最高的 300 个关键词的网络可视化
2.1 自动驾驶技术
自20世纪中期以来,自动驾驶技术不断迭代升级(Alawadhi等, 2020)。目前,随着创新技术的应用,高等级自动驾驶汽车系统已逐渐成熟(Ma 等, 2020)。全球范围内,以谷歌、百度、优步、华为、特斯拉为代表的企业在城市无人公交、无人出租车等领域都有所突破。聚焦中国区域来看,百度研发的Apollo 2.0无人驾驶平台系统早在2017年就已实现城市道路上的自动驾驶(国家统计局, 2018)。2020年10月,中国移动与轻舟智航合作推出的5G无人公交实现了4级自动化,并在苏州高铁新城常态化运营。2022年4月28日,百度在北京推出的全自动化出行服务标志着中国实现了世界上第一个在超大城市的无人出行服务(百度Apollo,2022)。2022年4月28日,此外,麦肯锡公司的一项调查显示,涉及全球自动驾驶的汽车、交通和软件公司中的75位高管预期,自动驾驶出租车服务有望在2026年及以后实现大规模推广。其中,中国和美国将在这一市场中处于领先地位(Heineke等, 2021)。综上所述,中国的自动驾驶技术已较为成熟,诸多开创性项目和企业实践为这一领域奠定了坚实基础。
尽管自动驾驶尚未在特定城市交通场景中实现全面应用,但智能仓库中的AGV调度系统已经成为一个具有说服力的概念验证实例。在这一背景下,仓库本质上可以类比为传统的道路网络,其中AGV相当于自动驾驶车辆,物理设施则代表障碍物,货架搬运需求类比出行需求。因此,智能仓库的内部物流流程可以看作一个封闭道路网络中的自动化交通运作过程。当前亚马逊KIVA系统、京东无人仓系统、菜鸟天猫超市快仓系统等诸多电商企业都已成功引入自动机器人系统。这些系统的调度模式和运作规则,均为城市自动驾驶交通提供了一定的参考。此外,随着无人港口、无人配送等城市局部物流场景的实践和发展,城市管理部门可不断累积经验,探索更成熟的发展模式。
2.2 单车智能和车路协同
自动驾驶有两种发展路径:单车智能(IVD)和车路协同(VIC)。早期研究基本都是围绕“如何让车辆依靠自身的视觉、毫米波雷达、激光雷达等传感器、计算单元、线控系统进行环境感知、计算决策和控制执行”这一主题展开,也即单车智能。但单车智能存在明显劣势:①安全问题(Koopman 和 Wagner, 2017)。单车智能自动驾驶经过多年的发展,可将安全性提高至99%,但最后1%的风险仍未得到有效解决,并将在很长一段时间内无法得到解决。特别是L5级自动驾驶车辆的可靠性和应对复杂交通场景的处理能力,依靠单车智能很难得到保障。②经济性问题显现。自动驾驶车辆需要配置更多、更高标准的车载传感器和软件系统,这大大增加了车辆成本,难以实现大规模落地。③路况识别问题。城市交通场景涉及不可预估的人类行为、极端天气环境、突发事故等多种来自车外的挑战的不确定因素,增加了单车智能准确识别路况、应对复杂场景的难度。
鉴于单车智能路线有多处发展瓶颈,车路协同路线应运而生。车路协同是指基于单车智能,建设智能的基础设施,采用先进的无线通信和新一代互联网等技术,在每一辆自动驾驶车辆上安装与道路基础设施连通的V2X(Vehicle to everything)装备,将人-车-路-云连接起来。相较于单车智能,车路协同弥补了车端感知的不足,提升驾驶安全性和效率。此外,将单车成本转移至基础设施建设成本,可实现成本随时间摊薄,降低个人购车经济压力,有利于自动驾驶车辆的大规模商业化落地。目前,政策制定者、行业专业人士和研究人员更倾向于V2X的车联网、车路协同发展路线 (Bansal 和 Kockelman, 2017)。大多数人认为,车路协同更具发展前景,可以实现交通系统全局效率最大化(Ma, 2021)。
值得注意的是,当前车路协同主要是在局部调度模式下运作。车路协同与单车智能的根本区别在于车辆与周围环境的交互方式以及对环境信息的利用程度。在单车智能框架下,车辆通过其传感器系统收集局部环境数据,并制定最优路径以最小化驾驶成本。相比之下,车路协同模式强调通过互联网技术汇聚所有信息,并将精简后的数据传递到每辆车。理想情况下,车路协同模式应实现全局控制,最终目标是优化整体交通运行。然而,实际上,当前的车路协同主要集中于优化单个车辆的性能,而非实现全局优化。
2.3 国家政策和社会接受度
政策支持是自动驾驶持续发展的关键条件。2013年,美国国家公路交通安全管理局 (NHTSA) 发布了《关于自动驾驶汽车的政策初步声明》,首次定义了自动驾驶的级别。2016年,维也纳道路交通公约(日内瓦)正式接受自动驾驶。同年美国汽车工程协会对自动驾驶汽车的六个等级做出更细致的分类(SAE, 2016)。近来,各国都在积极制定政策,以规范、引导和推动自主交通的发展:2019年欧盟发布了《欧盟自动驾驶车辆许可豁免流程指南》, 2020年美国颁布了《自动驾驶汽车4.0:确保美国在自动驾驶技术方面的领导地位》。值得注意的是,2021 年 5 月,德国联邦议院通过了《自动驾驶法》草案,德国由此成为了全球首个允许无人驾驶车辆参与日常交通的国家。
中国近年来更是不断加强对自动驾驶的政策引导和扶持力度。2018年,国家发改委将智能汽车产业定位为“战略性、支柱性产业”。2020年2月,《智能汽车创新发展战略》进一步细化了我国智能汽车产业发展顶层设计,并提出“实现有条件自动驾驶的智能汽车达到规模化生产,实现高度自动驾驶的智能汽车在特定环境下市场化应用”的目标。截至 2023年6月,中国国家级单位和18个省级单位累计发布了 100多项与自动驾驶产业相关的政策。特别强调,中国政府对车路协同给予了高度重视,并积极制定战略规划和标准。在构建综合交通运输体系和推进智能交通的过程中,车路协同始终作为与大数据信息平台相匹配的首选发展路线。2021 年,随着中国 "十四五 "规划的启动,智能交通已成为加强国家交通基础设施建设的关键因素。人、车、路、云技术的融合与协调已变得十分重要,车路协同和车联网技术的部署和使用也明显加快。因此,未来城市自动驾驶交通将以车路协同为主要技术路线。
公众意愿和接受度对于加快自动驾驶交通的发展具有重要意义(Xu 等, 2018b; Liu 等, 2019)。当前大多数研究都是以随机方法在国际或国内大范围收集数据,研究结果一致强调了公众普遍支持自动驾驶,并预期自动驾驶将更深入地融入未来交通(Kyriakidis 等, 2015; Schneble 和 Shaw, 2021)。多年来,公众对自动驾驶汽车的接受度一直呈上升趋势(Zmud 等, 2016; Sener 等, 2019)。此外,还有大量文献发现,公众对自动驾驶的接受程度受年龄(Zou 等, 2022)、对技术了解程度(Ho 等, 2020)、受教育程度(Haboucha 等, 2017)、收入水平(Howard 和 Dai, 2014)、价格(Rezaei 和 Caulfield, 2020)等多种因素的影响,但对自动驾驶技术的信任度是决定人们是否愿意使用自动驾驶汽车的关键(Piao 等, 2016; Kaur 和 Rampersad, 2018; Rezaei 和 Caulfield, 2020)。在2021年,易车研究院调研数据表明,有高达32.28%的中国用户愿意为自动驾驶汽车买单,不愿意的仅有15.65%,其中有52.07%的用户处于观望状态,极有可能转换为愿意买单用户。由此可见,随着自动驾驶测试里程增加、测试场景扩大,自动驾驶安全性得到进一步验证,人们对相关技术的信任度将进一步增加,自动驾驶车辆的市场空间(尤其中国市场)得以快速扩张,进而推动自动驾驶交通的发展。
2.4 集中和分散决策模式
此外,关于城市交通控制模式和方法的研究可分为两类:集中控制模式和分散控制模式。在集中控制模式中,所有交通数据都传输到中央控制器,由其负责执行所有控制行动(Chow 和Sha,2016)。而在分散控制模式中,每辆车都会根据传感器获取的信息或从其他车辆和路边装置接收的信息自主决定自己的行动,以最大限度地提高自身性能(Yao和Li, 2020)。大量文献探讨了城市交通中集中式和分散式控制模式的有效性。但是,如表1所示,几乎所有不限制交通环境的文献,提到的集中控制/分散控制模式都是针对交通信号灯配时优化问题。此类研究针对路网中所有信号灯,通过控制交通信号灯的配时计划,来最小化路网交通延迟,并不强调控制车辆,也不会决策车辆的路径。由于不针对车辆,此类研究也不受限于人类驾驶环境或自动驾驶环境。
表1. 相关文献总结
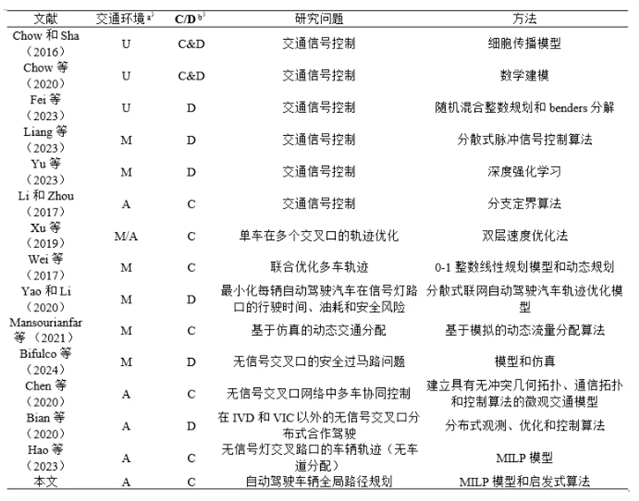
注: a) A-自动驾驶交通/M-混合交通/U-无限制; b): C-集中式, D-分散式
在考虑自动驾驶环境的文献中,提到的集中控制都是针对局部小范围场景,尤其是交叉路口。这些文献通常以路口为中心,设置管控半径,划定集中控制区域。在这一区域内,系统决定车辆速度、优先级(避免碰撞规则)等参数(Chen等, 2020)。此外,一些学者还对无信号交叉路口的分布式协同驾驶问题进行了研究(Bian 等, 2020)。但是上述研究仅在小范围路网中实现对车辆具体行驶决策的管控,目的在于提高路口处局部路网的交通效率,并不为车辆规划从起点到目的地的完整行驶路径,也没有实现均衡路网资源、调控各个路段车流密度的作用。这一点在最新的关于自动驾驶交通研究综述中可以得到证明(Li 等, 2023)。还有一部分研究聚焦于包含人类驾驶车辆和自动驾驶车辆的混合交通环境下的车辆路径或轨迹规划问题。例如,Xu等人(2019 )研究了单车在多个交叉路口的轨迹优化,重点是提高燃油效率和行驶效率。然而,人类驾驶车辆的路径或轨迹是不可预测的,不利于集中控制模式的实施。因此,研究使用一套系统集中规划车辆从出发地到目的地的路径仍然是一项艰巨的挑战。
2.5 研究述评
不可否认,自动驾驶汽车仍面临着一系列严峻的挑战,包括测试里程不足,制造成本居高,对交通规则、法律和伦理道德的挑战较大(Sparrow 和 Howard, 2017)等诸多问题,但其带来的直接经济效益与环境效益,以及改善居民生活质量等潜在效益是不可估量的(Howard 和 Dai, 2015)。随着技术的进一步突破和管控方式的不断发展,自动驾驶交通极有可能主导几十年后的世界交通。但现有研究中,主题为“工程学、计算机科学和自动化控制系统”等自动驾驶技术类文献占比高达80%以上,而关于“Science issue”的文献约有0.3%,其中聚焦于城市问题的文献仅有 0.03%。这种结果突出表明,相关文献多聚焦于自动驾驶车辆技术层面的讨论,鲜少有学者围绕“自动驾驶车辆如何影响未来交通,未来交通如何适应自动驾驶车辆”进行全面性的总结与分析。基于此,本文针对自动驾驶环境下的城市交通调度模式展开研究,旨在探讨新调度模式的运作条件、内在机制和潜在优势,以更好地了解自动驾驶汽车在城市交通系统中的未来前景。
3.城市自动驾驶交通全局调度模式设计
全面实行自动驾驶是自动驾驶发展的最终目标(Panagiotopoulos and Dimitrakopoulos, 2018)。然而,由于不同国家的技术标准、政策法规、道路特征等区别较大,每个国家全面自动驾驶交通的实现速度、管理模式也会有所差异。本文将聚焦中国,从发展方向、交通调度模式两个方面,研究基于自动驾驶的中国城市交通的发展及管理要点。
3.1 全局调度模式的概念
本文提出一种新的城市自动驾驶交通全局调度模式:遵循车路协同基本思路,以城市交通管理部门为中心,依托智慧交通云管控平台,集成管辖区域内的车辆子系统信息,对路网车辆进行集中管控、全局调度。这种模式包含两个方面的全局性:①全局路网车辆调度。即对特定范围路网内的所有车辆统一调度。②全局车辆行驶方案规划。即决策出每一辆车从出发地到目的地的完整、具体行驶方案。
传统交通模式中最核心的组成是交通管制规则、驾驶员技能和红绿灯。当自动驾驶车辆慢慢渗透至城市交通,就会形成混流模式。此时,道路中的部分自动驾驶车辆可根据感知范围内的道路情况,规划局部行驶路径。但由于路网中还存在部分人类驾驶车辆,所以交通运作仍需要上述三个基本条件。当自动驾驶车辆渗透率达100%时,道路中可能不再需要红绿灯指示车辆(Duarte和Ratti, 2018),交通规则将嵌入车辆调度算法中,公众不需要具备驾驶技能。城市交通中的基础设施与车辆之间信息互连,并集成到交通大数据中心,大数据中心负责统一调度所有车辆,最终形成一张高效的城市路网。
基于集中管控、全局调度的自动驾驶交通模式,具有突出优势。①城市路网的通行能力将大幅提升。路网中大量的自动驾驶车辆能实现以较小的固定间距和较大的速度有序行驶,从而缓解交通拥堵,有效提高道路通行效率。同时,全局调度保证每辆车都能找到与路网运行状况相适应的最优或近似最优路径,进一步提高通行效率;②极大增强城市交通的风险管控与应急处理能力。全局调度使城市管理者能够实时掌握路网整体运行状况,及时处理突发交通事故。此外,对于警车、救护车、消防车等特种执勤车辆的调度也更为灵活,从而确保特殊车辆在紧急情况下优先通行;③提升交通安全性。全局调度将车辆信息集成处理,精准预测路网中每一车辆的行驶状态,规避车辆局部决策造成的响应不及时、识别不准确等问题,让行驶更为安全可靠。因此,全局调度能够最大化自动驾驶效益,实现城市交通高效有序、安全便捷、绿色健康的持续发展。
综上所述,随着自动驾驶的出现与普及,以及车路协同路线的打通,车与车、路、人、云平台将全面实现动态实时信息交互。在全时空动态交通信息采集与融合的基础上,全局调度交通模式将成为未来交通发展的重要趋势。
3.2 全局调度模式的机制
如3.1节所述,全局调度具有诸多优势,但也对硬件和软件配置提出了更高的要求。理想的全局调度模式依赖于能够影响所有自动驾驶车辆综合管理的集中式云控制平台。然而,在开放性、高度复杂性、非线性和参与者众多的城市交通环境下,这种理想模式对交通部门设备的管理能力和计算能力提出了巨大挑战。
为了应对复杂的控制问题并克服计算方面的限制,借鉴已有城市交通管控思想,本文考虑大规模路网分区管控(Walinchus, 1971; Dantsuji, 2019)。这种方法将路网按一定规则划分成若干同质且可控的交通控制子区,再进行区域间协调-分区控制(Leclercq 等,2021 )。每个子区域内实行自动驾驶车辆的全局调度。每个交通子区的控制机制与不考虑分区的城市交通控制机制相同,只是因计算能力不同而在响应时间上有所差别。图2直观展示了城市路网分区及每个交通控制子区域的全局调度机制:每个交通控制子区都拥有一个标准统一的智能交通系统,各系统之间实现数据互联互通。智能交通系统包含多个功能模块,分别负责数据收集、交通信息处理和车辆调度等。其中,调度模块具有两大核心功能:①监测与实时更新区域内全局路网信息。包含高精度地图数据、路况信息(如车辆密度、交叉口流量等)以及天气等环境信息。②区域内自动驾驶车辆调度决策。理想情况下,理想情况下,智能交通系统会为每一辆进入路网的自动驾驶车辆做出实时调度决策。但实际中,当有多辆车连续发出行驶请求时,基于车辆需求进行实时调度是对管控平台算力的巨大挑战。因此,本文提出基于固定周期进行调度决策,即收集一定时间段内,即将进入路网的自动驾驶车辆的行驶需求信息,当下一个调度周期开始时,智能交通系统会对它们进行统一调度。
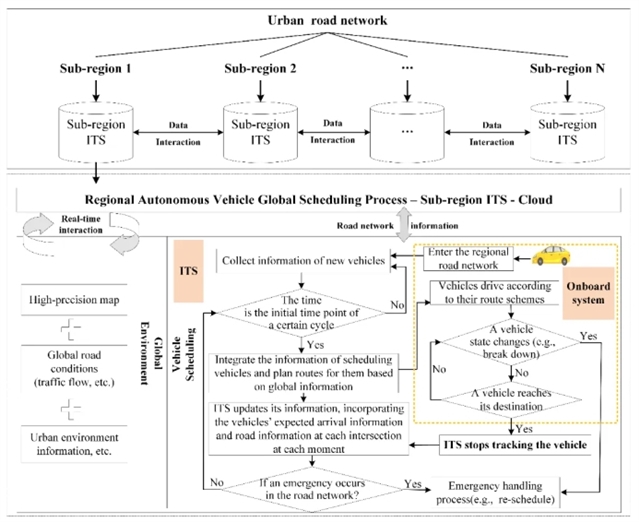
图2. 全局调度模式的运作机制和流程
调度决策过程具体可描述为:智能交通系统每隔固定周期 P(以秒或分为单位),统一调度新进入路网的自动驾驶车辆(下文称为待调度车辆)。在某一时刻,区域内的一辆自动驾驶车辆发出行驶请求,车辆的车载系统立即将行驶需求信息(如车辆位置、目的地等)上传至智能交通系统。若请求时刻未到达特定周期的启动时间,则车辆保持当前状态,智能交通系统继续收集新的待调度车辆信息。当到达下一调度周期初始时刻,智能交通系统整合该批次待调度车辆信息,并考虑当前路况、行驶规则和车辆需求,利用调度算法为每辆车制定具体的行驶路径方案 ,包含需要经过的路口、预计到达各个路口的时刻、预计在各个路口的必要等待时间等。考虑由其他子区进入当前子区的自动驾驶车辆,在区域边界停靠等待调度将会降低路网及车辆运作效率。因此,本文提出对该部分车辆实行提前调度,实现车辆在子区域间的无缝转换,同时最大限度地减少对交通连续性的干扰。即预估该类自动驾驶车辆到达下一子区的位置及时刻,在该车辆到达时刻所处的调度周期初始时刻,就为其规划行驶路径。行驶路径方案制定后,待调度车辆转为已调度车辆。智能交通系统持续监控路况,而车载系统则实时监控车辆状态。如果路网出现交通事故等突发状况,则进入应急处理流程。例如,如果车辆突然发生故障,其信息会迅速传送到智能交通系统,从而启动应急响应,包括在受影响区域内实施临时交通限制,以及重新安排受影响车辆的行车时间。
3.3 基于优先级规则的避撞策略
传统人类驾驶模式需要通过设置红绿灯和交通规则实现避撞。但自动驾驶模式下,只需将交通规则融入管控平台的调度算法。由于不同路段在城市交通中发挥的作用不同,且路网中存在救护车、消防车、警车等需要优先通行的特殊车辆。本文提出设置同时考虑道路与车辆等级的优先级规则:①车辆优先级规则:将路网中的车辆分为两类,Ⅰ类特殊车辆包含警车、消防车等,Ⅱ类普通车辆包含其他车辆类型。Ⅰ类车辆优先于Ⅱ类车辆;②道路优先级规则:根据路段的通行能力和对整个交通的影响程度等多项指标,将路段划分为四个不同的等级。同一路口所连接的不同路段分别对应不同的等级。在高等级路段行驶的车辆优先于在低等级路段行驶的车辆;③道路与车辆混合优先级规则:车辆优先级高于道路优先级,简单地说,即在低等级路段行驶的特殊车辆比在高等级路段行驶的普通车辆优先通行。
3.4 基于调度规则的避撞策略
城市交通需求动态变化,自动驾驶车辆会持续进入/离开路网。因此,每批次待调度车辆在获得路径方案前,既要考虑同批次待调度车辆之间的碰撞避免,又要考虑与路网已调度车辆之间的碰撞避免。为解决这个复杂的问题,本文设置不同批次车辆在路口的调度优先级规则为:已调度车辆高等级路段的Ⅰ类待调度车辆低等级路段的Ⅰ类待调度车辆高等级路段的Ⅱ类待调度车辆低等级路段的Ⅱ类待调度车辆,即先进入路网的车辆拥有路口优先通行权,以提升交通管理的整体效率和安全性。
4.自动驾驶车辆全局调度问题
4.1 问题描述
本文首次为城市自动驾驶车辆引入了一种新的全局调度模式。为了阐明这种全局调度机制的复杂性,我们定义了自动驾驶车辆全局调度问题(Autonomous vehicle global scheduling problem, AVGSP)。AVGSP 利用一个交通管控平台,基于当前路网运作状况,为某一调度周期的全部自动驾驶车辆规划具体行驶方案,主要目标是最小化批次中所有调度车辆从起点到目的地的总行驶时间。
作为自动驾驶车辆全局调度问题的首次研究,考虑到城市道路大多为纵横交叉式,本文将城市交通网络简化为一个仅含道路与自动驾驶车辆的结构化路网。如图3(a)所示,直线相交的点表示路网的十字路口,如①、②…(下文用n1,n2,…表示);路口之间相连的直线表示路段,用 Rij 表示从 ni 到 nj 的道路。本文将路网中的道路均设置为双车道,所有车辆均可在路口选择转向或继续直行,但必须遵循车道指示的方向;如图3(b)所示:在路段 R18,13 车道行驶的车辆既可以直行进入路段 R13,8 向下车道,或右转进入路段R13,12 向左车道,也可以左转进入路段 R13,14 向右车道。
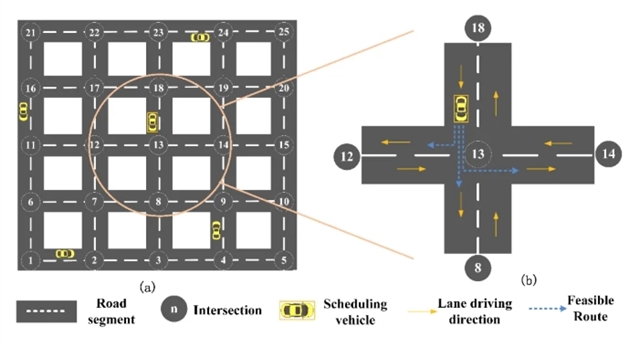
图3. 路网布局
车辆碰撞可大致分为路段中碰撞和交叉口碰撞两类。路段中碰撞通常是由换道、减速、加速等行为导致,交叉口碰撞则主要是由于路口交通容量有限及车辆行驶方向冲突引起的。但在本文设置的路网中,路段均为两条单向车道且自动驾驶车辆保持匀速行驶。因此,不考虑车辆在路段中碰撞的情况,仅分析在交叉口处的碰撞情况。图4总结了交叉口碰撞的各种情况,当车辆1沿蓝色虚线行驶,而车辆2按照红色虚线表示的方向行驶时,两车将发生碰撞。
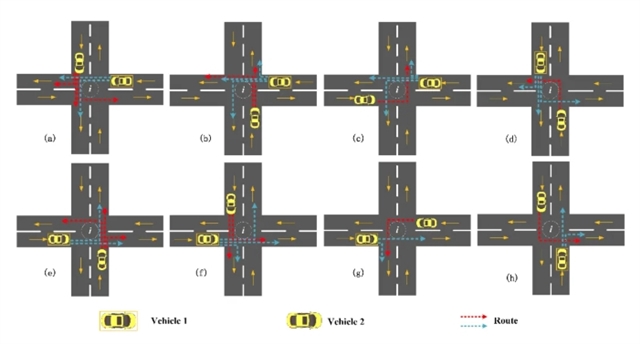
图4. 交叉口碰撞情况分析
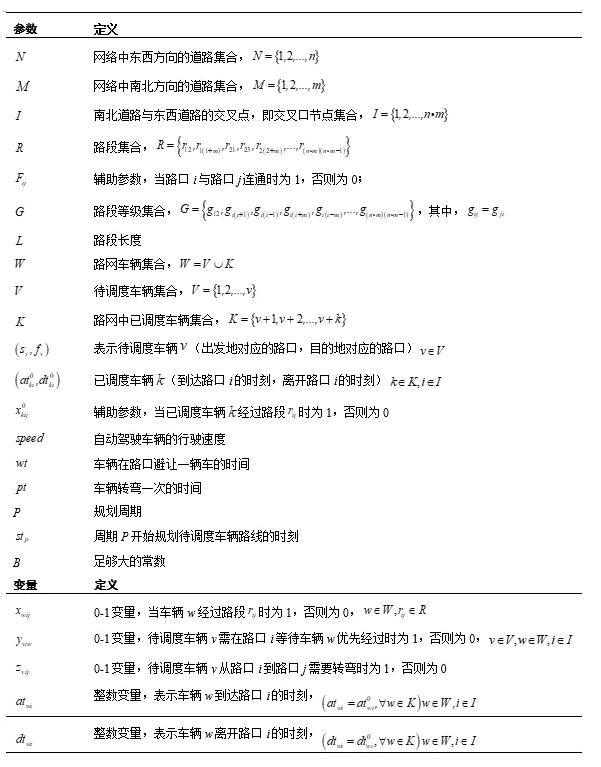
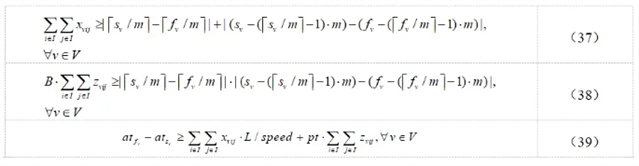
AVGSP可详细描述为:在正常运作的路网 G=(I,R) 中,其中 I 表示交叉路口集合,R 表示路段集合。已被调度的自动驾驶车辆(表示为集合 K ),按照智能交通系统的命令有序行驶。在时刻 t ,一批停靠在不同地方的自动驾驶车辆发出行驶请求,也即待调度车辆(记为集合 V )。智能交通系统统一收集待调度车辆的行驶需求信息(如出发地、目的地等),并根据路网运作现状,迅速为该批次待调度车辆,规划出从出发地到目的地、与其他车辆无碰撞,且在路网运行总时间最短的行驶路线方案。为方便建模,考虑如下假设:①除避撞因素外,车辆中途不暂停;②不考虑车辆启动和刹车时的加速度,路网中所有车辆均保持匀速行驶。③本文仅考虑普通车辆;④车辆出发前或到达终点后,不会对路网中其它车辆产生干扰。模型中使用的参数符号及相关定义如表2所示:
表2. 参数和变量
4.2 数学模型
AVGSP的数学模型如下所示:
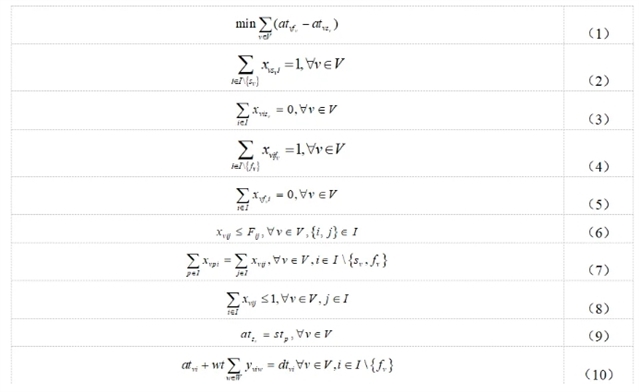
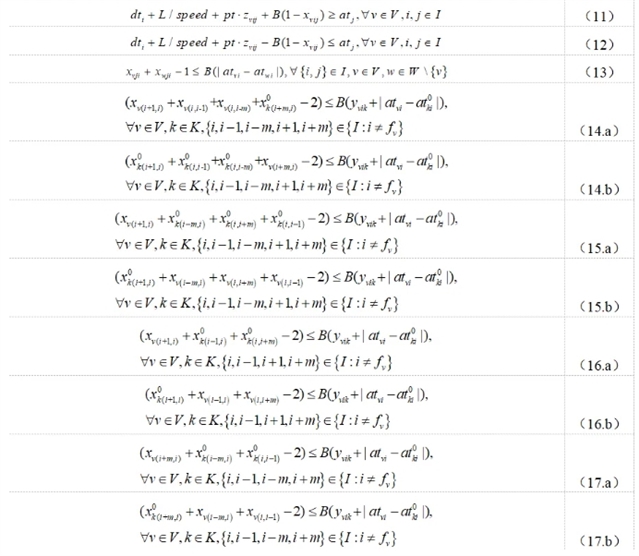

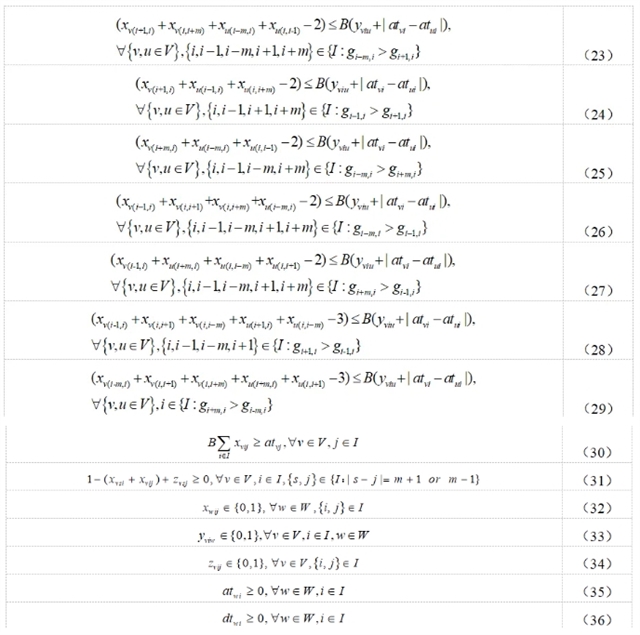
式(1)表示最小化所有待调度车辆的总行驶时间。式(2)、式(3)表示待调度车辆 v 从起始点出发 sv ;式(4)、式(5)表示待调度车辆 v 到达目的地 fv ;式(6)表示当路口 i 与路口 j 不连通时,任何待调度车辆都不能经过路段 rij ;式(7)表示待调度车辆从路口 i 离开当前路段,必定从路口 i 进入下一路段( i 不为出发点或目的地);式(8)表示待调度车辆在同一路口至多经过一次;式(9)表示系统开始为待调度车辆规划行驶路线的时间;式(10)表示车辆离开路口 i 的时间等于到达时间与等待时间之和;式(11)、式(12)表示车辆到达下一个路口的时间等于离开前一个路口的时间与行驶时间、转弯时间之和;式(13)表示单车道约束。式(14)~式(21)表示在时刻 t ,待调度车辆 v 与已调度车辆 k 同时到达路口 i 且存在冲突情况,车 v 需等待车 k 优先通过,其中式(14.a)和(14.b)对应图6(a),式(15)~(21)依次对应图6(b)~ (h);式(22)~式(29) 表示在时刻 t ,待调度车辆 v 与待调度车辆 u 同时到达路口 i ,且存在冲突情况,车 v 需等待处于等级较高路段的车 u 优先通过。同上,这些约束依次对应图6(a) ~ (h);式(30)表示待调度车辆 v 不经过路口 i 时,在该路口的实际到达时间为 0;式(31)判断车辆是否转弯。式(32)~ (36)表示决策变量的取值范围。
为提高模型运算速度,给出以下有效不等式:其中,式(37)与(38)分别表示车辆 v 需要经过的最少路段数与最少转弯次数。式(39)表示待调度车辆 v 的最短行驶时间。考虑到在结构化路网中,应采用曼哈顿距离公式来确定从 sv 到 fv 的距离。此外,通过比较 sv 和 fv 的横纵坐标来确定车辆是否需要转弯。最短行驶时间既考虑了在路段的行驶时间,也考虑了转弯时间。
5.一个改进的A*算法
随着交通网络规模的扩大,AVGSP的复杂性也显著增加。在实践中,精确算法难以解决大规模实例,因此,开发更高效的启发式算法至关重要。本文提出的AVGSP可视为最短路径问题的一个变种。具体来说,城市交通道路网可以转化为一个有向图,交叉口为节点,路段为边。此外,每个路段的通过时间表示其对应边的权重。在路网只容纳一辆车的情况下,本文所要解决的问题是找出从车辆当前节点到目标节点的最短路径,这与经典的最短路径问题非常相似。然而,在路网中存在多辆汽车的情况下,研究问题必须考虑碰撞约束,这一约束极大地增加了问题复杂性。A-star算法是解决最短路径问题最成熟的路径规划算法之一,已被广泛应用于交通路径规划(Ju等,2020;He等,2022;Zhang 等,2023)。因此,本文设计一个MASA来求解研究问题。
5.1 数据预处理:分解已调度车辆
在实际场景的路网中,存在大规模正在运行的已调度车辆。利用算法决策待调度车辆与已调度车辆的避撞方案时,如果针对每一待调度车辆,都与所有已调度车辆逐一判断是否在时间和空间上发生路径冲突,则会产生大量的重复运算。为解决这一问题,本文提出一种检测多车避撞的方法,即在每个交叉路口利用时间点向量。当自动驾驶车辆的初始行驶方案确定后,根据车辆的预计到达路口和到达时刻,利用单元化思想对车辆进行分解。最后,所有车辆路径都被封装在一个交叉口地图中,其中交叉口作为键,相关值构成到达时间点向量及其各自的车辆 ID。图 5通过一个示例直观地展示了这一过程。车辆v1、v2和v3的路径分别为 a(t1)→b(t2)→c(t3),d(t1)→e(t2)→c(t3)和c(t1)→f(t2)→g(t3)。其中,a,b,c等表示不同的路口,t1,t2,t3等表示在路口的到达时间。例如,车辆 v1 在路口 a 的到达时间为 t1。则 t1 时,路口 c 对应的车辆集合为{v31},t3时,路口 c 对应的车辆集合为{v13, v23}。考虑上述分解策略的AVGSP模型,需调整部分参数和变量,具体如表3所示:

图5. 基于路口视角分解已调度车辆
表3. 新引入的参数
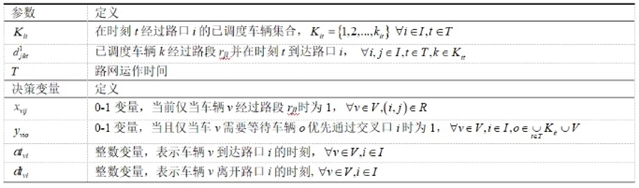
约束(40)用来代替约束(10),约束(41)和约束(42)代替约束(13), 约束(43)~(50)代替约束(14) ~ (21)。

5.2 改进策略
在A*算法中,评估函数的计算至关重要。传统A*算法的评估函数通常如式(51),其中,F(n)表示从当前位置到目的地的估计代价,g(n)表示从当前位置到位置 n 的估计代价,h(n)表示从位置 n 到目的地的估计代价。

虽然 AVGSP 与最短路径问题有相似之处,但也有明显区别。本文研究目标不再是寻找行驶路径最短的调度方案,而是决策出使路网中所有待调度车辆的行驶时间、等待时间和转弯次数达到最优状态的综合车辆调度方案。因此,本文改进了传统A*算法:
1)考虑等待时间和转弯时间
车辆从出发地到目的地的总时间不仅包括行驶时间,还包括由于避撞产生的等待时间以及转弯时间。特别是在交通拥堵的路段,等待时间成为一个重要的考虑因素。因此,本文在计算当前位置到下一位置的估计代价时,同时考虑行驶时间、预计等待时间(等待路网已有车辆和待调度车辆的时间之和)和转弯时间。公式(52)表示从路口 i 到路口 j 的估计代价:

2)强化方向因子
目的地和出发地一旦确定,两地之间的方向关系随之确定。当车辆背离出发地逆向行驶时,很大程度上会增加全局转弯次数和行驶时间。因此,本文在代价函数中加入了对 d方向因子的激励/惩罚,表示为式(53):minInfv表示从 n 到目的地至少经过的路段数。α 表示方向惩罚因子,正向行驶为负,逆向行驶为正:

3)考虑算法效率
算法执行过程中,可能出现“正在规划路线的待调度车辆v,如果选择路口 j 作为下一行驶路口,就会与已规划路线的待调度车辆 u 在当前路口产生冲突,且根据道路优先级规则,车辆 u 需要等待车辆 v 优先通过”的情况。该情况下,当车辆 v 确定驶向路口 j 时,系统需要重新规划车辆 u 从当前路口到目的地的行驶方案,这将降低算法效率。因此,本文用 dv (i→j) 表示车辆 v 从路口 i 到路口 j 的效率惩罚,其中 u 表示需要重新规划行驶路线的待调度车辆:

综上,MASA的代价函数表达式为式(55):

5.3 MASA的框架和流程
本文所设计的改进A*算法,具体执行步骤如下:
步骤1:初始化:输入路网信息、处理后的已调度车辆信息及待调度车辆信息。用集合TV表示待调度车辆集合,集合PV表示已规划初始路线的待调度车辆集合,集合RV表示需要重调度的车辆集合;
步骤2: 车辆排序:计算各待调度车辆从起点到终点需经过的最少路口数,并根据计算结果按由小到大的顺序对TV中的待调度车辆排序;
步骤3:选择当前需要规划路径的车辆:若TV≠∅,则选择TV中首个元素对应的车辆v进行路径规划,执行步骤4;若TV=∅,则转至步骤7;
步骤4:规划车辆 v 的行驶路径:用集合O表示与车辆 v 当前所在路口i相连的路口集合(即下一候选路口集合)。当 fv∈O时,直接将 fv 作为下一行驶路口。否则,依次计算O中所有元素的代价函数,并选择代价函数值最小的路口 m作为下一行驶路口;
步骤5:判断当前车辆的行驶方案是否会导致PV中的车辆行驶方案发生变化。如果引起了其他车辆u行驶方案变化,则将车辆 u 从PV中移至RV,同时记录路口 i 为车 u 的重调度路口节点。若 v∈TV,执行步骤6;若v∈RV,则转至步骤7;
步骤6:令 i=m,当 m=fv 时,从集合TV中删除车 v 。转至步骤3;否则重复步骤4;
步骤7:若RV≠∅,则执行步骤8;若RV=∅,则执行步骤9;
步骤8:选择RV中首个元素对应的车辆 w ,从对应的重调度路口节点开始,更新路线方案:不改变行驶路线,仅更新重调度路口及之后各路口的到达时刻、避撞方案、离开时刻。更新后,将车 w 从RV中移至PV,返回步骤5。
步骤9:输出所有待调度车辆的路径方案,停止运算。
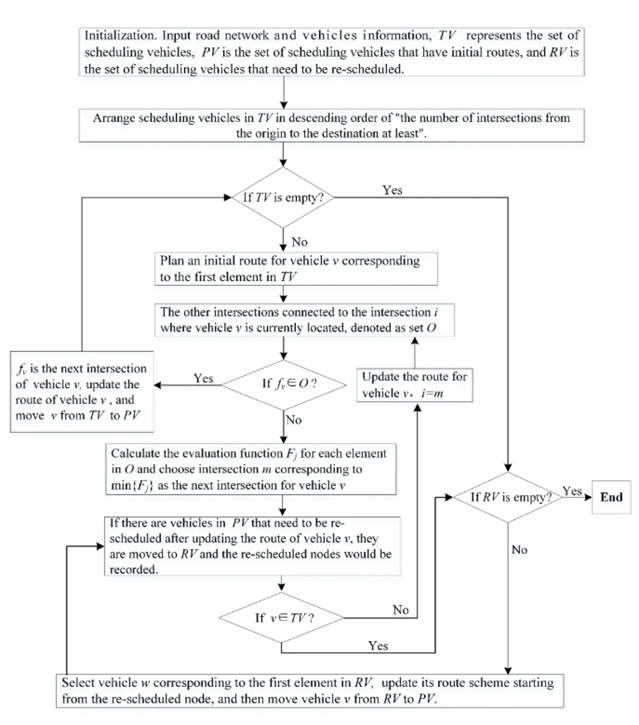
图6. MASA算法框架
6.数值实验
本节实验有两个主要目的:①验证本文提出的模型及算法性能;②验证全局调度对路网交通的改善作用。共进行了三次实验:第一次实验针对初始周期的路网,即 P=1,该状态下路网中无已待调度车辆。然后,将第一次实验结果作为下一周期(即 P=2)的已调度车辆行驶方案,进行第二次实验。其中,每次实验设置8种、24组小规模算例,以验证模型的准确性和算法的有效性。此外,本文设置12种、 36组大规模算例,以对比传统A*算法和本文MASA算法的性能。此外,第三次实验旨在评估全局调度和局部调度两种决策方式的差异。为此,本文固定路网规模,生成5个车辆规模不同的算例。所有测试在Intel Core i7-10510U 4.1GHz CPU,RAM为12GB的个人计算机上运行,模型求解器为CPLEX 12.8,启发式算法采用C++编码,在Visual Studio2022平台上实现。
6.1 参数设置
本文构建虚拟路网环境:①首先,设置5x5(东西、南北方向的道路各5条)、10x10、20x20、30x30四种路网规模;②路口避撞决策基于上文所提出的道路与车辆混合优先级规则制定。因此,为避免由不同路段进入同一路口的同等级车辆发生碰撞,在设置路段等级时,应保证“同一路口所连接的各个方向路段等级不同”。每一路口最多连接四个方向的路段,故将路段设置为1-4 四级。具体生成规则及示例如图7所示(其中,linkij 表示路口i连接的j个路口,Levelis表示路段(i,s)的等级,PossibleLi 表示路口 i 连接的路段可取等级集合);③L为1.5km;speed为15m/s、wt为10s、pt为20s,α设置为0.3;④待调度车辆规模设置为{2,4,8,10,20,40,80,100}种;⑤周期间隔设置为60s;随机生成待调度车辆出发地、目的地、发出行驶请求时刻。
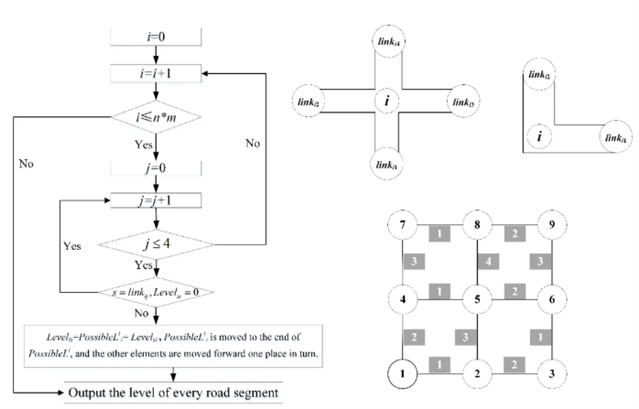
图7. 路段等级的生成过程
6.2 模型性能
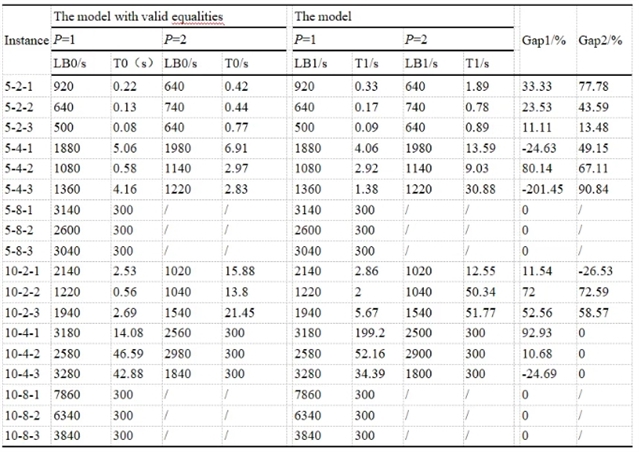
对于路网规模为5x5和10x10,待调度车辆规模为2、4 和8的小规模算例(每种问题规模由三个算例组成),本文同时用CPLEX 测试了基本模型和带有效不等式的模型,求解时间限制为300s。表4展示了P=1和P=2的测试结果(300s内无法获得下界的算例将不在表中展示)。表中各列的结构如下:“Instance”的构成为“路网东西(南北)方向道路数目-待调度车辆数目-(已调度车辆数目)-算例编号” 。P=2 时,规定已调度车辆数等于待调度车辆数。“LB”表示CPLEX得到的下界,“T”表示CPLEX实际求解时间,“Gap”的计算方式为:(T1-T0)/T1×100。P=1时得到的算例“5-2-1”的实验结果,将作为“P=2”中算例“5-2-2-1”的已调度车辆行驶信息。
实验结果表明,当待调度车辆规模上升至10时,两种模型均无法在300s内获得下界值。此外,由于在 P=1时,模型无法获得可行解的算例,不能作为 P=2时的已调度信息。因此,在 P=2时,仅求解12组算例。根据表4中的结果,可得以下结论:
1)有效不等式能够显著提高模型求解效率
在求解质量方面,有效不等式并无明显的作用,只能提高少量算例的下界(如“10-4-1”)。导致这种现象的原因可能是问题复杂度过高。然而,有效不等式在提高求解效率方面有明显效果。当 P=1时,针对能够求出最优解的12个算例,模型平均求解时间为25.44s,添加有效不等式后,模型平均求解时间缩减为9.96s,效率提升61%。当 P=2时,针对能够求出最优解的9个算例,添加有效不等式后,求解效率提升62%。
2)已调度车辆数目是影响模型复杂度的重要因素
在 P=1时,模型可获得12个算例的最优解,18个算例的下界,能够求解的最大问题规模为:10×10的路网、4辆待调度车辆。但在 P=2时,模型只能求得9个算例的最优解、12个算例的下界,能够求解的最大问题规模为:5×5的路网、4辆待调度车辆和10×10的路网、2辆待调度车辆。而两种状态下的主要区别在于已调度车辆的数目。因此可知,已调度车辆数目增多也是造成问题复杂度上升的重要因素。
表4. 小规模算例的结果
6.3 MASA的效果
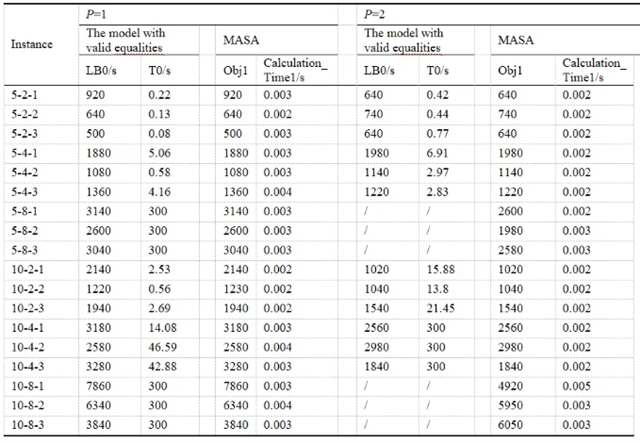
本节针对 P=1和 P=2状态下的72组算例进行实验,对算法性能进行测试。首先,利用本文算法MASA求解小规模算例,并将其结果与模型结果对比,实验结果如表5所示。然后,利用本文算法求解大规模算例,实验结果如表6所示。最后,选取 P=2状态下的大规模算例,利用传统A*算法求解,实验结果如图9所示。其中,表5加粗部分表示得到的最优解或可证明的最优解。
小规模算例实验结果,证明了算法具有较高的求解质量和求解效率:①针对可用模型求得最优解的21组算例,本文算法可得到其中20组算例的最优解。此外,针对利用模型只能获得下界的9组算例,本文算法可获得与其下界相同的解,证明了所得解的最优性,同时也证明了算法求解质量较高。特别注意,本文算法能够在0.005s内求解全部小规模算例。相较于模型,本文算法求解效率极高且稳定性较强。这些结果在一定程度上说明了本文算法能够满足路网的调度需求。
表5. 小规模算例的结果
但是,在求解大规模算例时,问题复杂性大大提高,以至于 CPLEX无法在规定时间内获得下界。因此,本文提出计算原模型的一个松弛问题的下界,即利用公式(37)-(39),计算所有车辆的最短必要行驶时间。表6展示利用算法获得的每种规模算例平均结果。其中, “Ideal Results”表示松弛问题的求解结果, “Turn_Time”表示总转弯时间,“Wait_Time”表示所有待调度车辆的避撞等待时间。根据表6可得出以下结论:①在大多数算例中,算法得到的结果与理想结果之间的差距在1%以内;②本文算法可在0.05s内获得所有大规模算例的求解方案。
表6. 大规模算例的结果
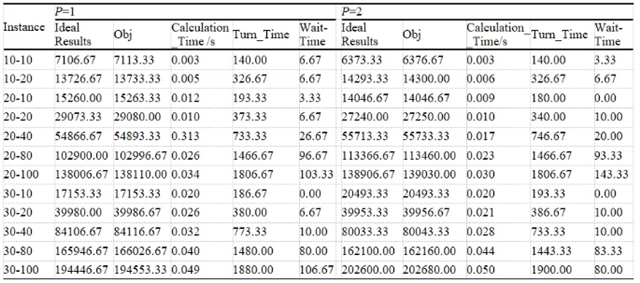
图 8显示了每个算例在 P=2时的结果。图中“20_ATT”(或 “30_ATT”)和“20_AWT”(或 “30_AWT”)分别表示路网规模为 20x20(或 30x30)时,每辆车的平均行驶时间和平均等待时间。从图中可以看出:在相同的路网规模下,路网中每辆车的总时间变化极小。然而,随着路网规模的扩大,每辆车的等待时间明显增加。此外,车辆密度增大会造成单位避撞时间的明显增加。

图8. 不同路网规模和车辆数量的算例结果
图 9直观显示了本文算法与传统 A* 算法在等待时间(ΔWait_Time)和求解时间(ΔT)上的差异。通过比较两种算法,可以发现本文算法的主要改进是减少了避碰时间。由于本文建立了一个路段长度一致的规则路网环境,因此两种算法的纯行驶时间没有明显差异。此外,虽然本文算法在计算评价函数时采用了改进策略,但这对计算时间的影响极小。因此可知,本文算法仍然具有较高效率,这也再次肯定了使用 A* 算法解决交通网络中全局调度问题的合理性和可行性。
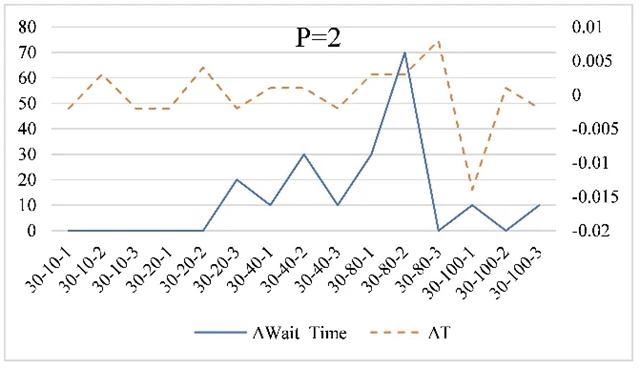
图9. MASA 算法与传统 A*算法的比较
6.4 考虑跨区域车辆的实验结果
从边界交叉口进入路网的车辆可分为两类:第一类是起点位于边界路口,这种车辆的调度方式与起点在路网中任意非边界路口的车辆的调度方式是一样的,都是按照固定周期统一调度。第二类是起点和终点位于不同区域,将会从边界路口进入当前区域的车辆。例如图10中所展示的:一辆车的出发点是子区域1的交叉口18,目的地是子区域2的交叉路口7。在这种情况下,子区域1的交通系统将会选择位于车辆起点到终点的最短路径且是到达下一区域的第一个路口作为临时终点,也即子区域2的路口16(子区域1的路口20),并为车辆规划从子区域1的路口18到子区域2的路口16的行驶路线并决策车辆到达路口16的预期时间AT。如果AT∈[Tm-1, Tm ),其中Tm-1表示上一个调度周期,Tm表示当前周期,跨区域车辆将被纳入子区域2周期Tm-1的待调度车辆集。因此,周期Tm-1的待调度车辆包括:在(Tm-2,Tm-1]时段内,发出行驶请求的车辆以及将在[Tm-1,Tm )时段内从其他区域进入当前区域的车辆。对于区域2的交通系统,跨区域车辆的出发时间为AT,出发地点为路口16,这些都是区域1的交通系统的决策结果,将会作为区域2的系统的输入参数。其他车辆的可出发时间为Tm-1,出发地点为各自的起点。
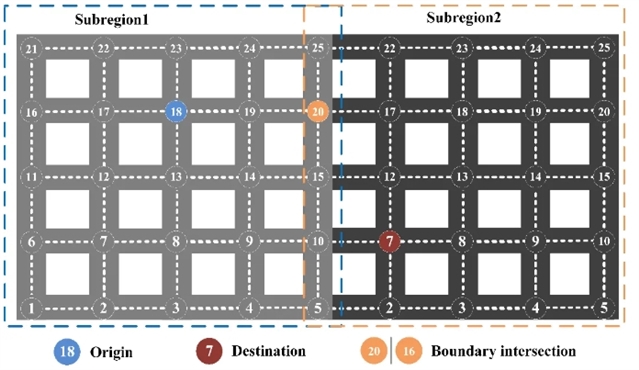
图10. 跨区域车辆的路线
在本节中,本文讨论了 P=1、路网规模为 {20x20, 30x30},待调度车辆规模为 {10, 20, 40, 80, 100}的30个算例。每种问题规模都设置了三个算例进行测试, 且在这些算例中引入了跨区域车辆,跨区域车辆占总车辆规模的比例设定为 0.2。对于出发地不在当前区域内的跨区域车辆,无法保证它们能在Tm出发。但是到达当前区域所需的时间会影响到达时间和在后续路口的避撞决策。基于此,同时考虑周期间隔为 60s,则设置 λ=30,生成泊松随机数作为跨区域车辆到达第一个边界路口的预期时间。实验结果如下表所示,“跨区域车辆比例=0 ”表示没有跨区域车辆的情况,“跨区域车辆比例=0.2 ”表示有跨区域车辆的情况。结果表明,即使在场景中引入了跨区域车辆,本文算法依然有效,凸显了其通用性和鲁棒性。
表7. 跨区域车辆不同比例的结果

6.5 基于大规模算例对比全局调度模式和局部调度模式
为进一步证明全局调度模式对城市交通效率的作用,本文固定路网规模,分别利用全局调度与局部调度两种模式进行实验,并比较了两种调度模式的交通效率。根据北京市交通部2023年劳动节假期的数据,北京高速公路的交通流量达到1388万辆,日均接近278万辆,高峰日达到302万辆(北京市交通部,2023)。以此为基准,每分钟进入路网的车辆数在1930到2097之间。实验测试了五种待调度车辆规模:500、1000、2000、3000和4000,路网规模固定为 20x20。局部调度模式包括选择车辆起点和终点之间最多只有一个转弯的最优路线,并将其确定为局部最优路线。如图11所示,如果车辆的起点(交叉口13)和终点(交叉口 12/18/9)位于同一条东西或南北路线上,选择直线路线作为最优路线。如果车辆的起点和终点允许有两条最优路线,则以0.5的概率随机选择其中一条作为最终行驶路线。此外,实验还统计了一个周期内通过每个路段的车辆数,结果见表8和表9。图12显示了在全局和局部调度模式下,每个周期内通过每个交叉口的车辆数差异的变化情况。
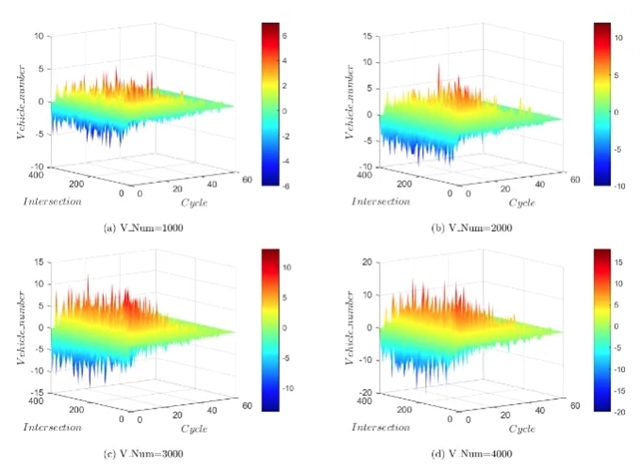
图11. 局部调度模式的最优路径

图12. 时空交通变化图
“V_Num”表示车辆总规模,“Vehicle_number”表示局部调度模式下通过路口的车辆数减去全局调度模式下通过路口的车辆数,“Cycle”表示时刻,其值为[0,100],“Intersection”表示路口数,其值为[1,400]。表 8 和表 9 分析了两种模式下所有路段和中心路段的车辆数(将 20x20 路网中 8-12 行和 8-12 列所围成的区域定义为中心区域,该区域内的路段即为中心路段):“Average、Max-min、Var”分别表示通过车辆数的平均值、最大最小差值和方差。“Average Gap”表示两种调度模式下各路段车流量的平均差距,计算公式为:(Local_Average-Global_Average)/ Local_Average。下图和表揭示了以下几个主要结论:
(1)在车辆密度相同的情况下,全局调度模式比局部调度模式产生的路段交通流量的平均值、最大和最小差值以及方差都要小。这表明,在全局调度模式下,车辆分配更加均衡,导致交通流量波动较小,各路段交通流量水平相似。相比之下,局部调度模式中,所有统计指标的数值都更高,方差明显更大,尤其是当车辆规模超过2000辆时。这表明局部调度模式更容易发生拥堵,这与当前的城市交通状况相吻合。
(2)在不同车辆密度下,全局调度模式比局部调度模式的平均交通流量减少约50%。在局部调度模式下,当车辆数从500辆增加到4000辆时,交通流量的平均值和方差都大幅增加,分别增加了60.31和776.57。然而,在全局调度模式下,增幅仅为30.00和415.09。因此,全局调度模式在均衡交通流量和降低拥堵风险方面具有显著优势,尤其是在高密度路网中。
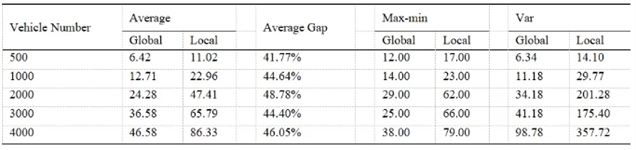
(3)表 9 显示,在两种调度模式下,中心路段的交通流量普遍较高。尤其是在车辆密度较高的情况下,中心路段的交通流量迅速增加,使管理更具挑战性。然而,比较两种调度模式(局部平均值-全局平均值)在中心路段的交通流量,差异更为明显,平均值增加了3.27。此外,全局调度模式更显著地减少了中心路段的交通流量波动,平均减少了 77.35%,而局部调度模式减少了51.86%。这些研究结果表明,全局调度模式能更有效地调节中心路段的交通流量,改善交通流量平衡,降低拥堵风险。
综上,全局调度模式能更有效地平衡交通流量、降低拥堵风险并加强各路段的资源分配。与局部调度相比,全局调度更具优势,能更有效地解决现存的拥堵问题。
表8. 两种调度模式下各路段的交通流量统计结果
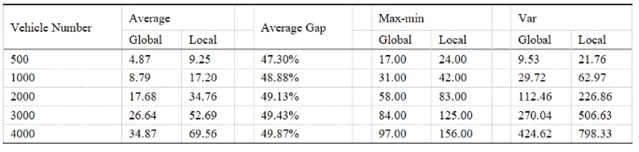
表9. 两种调度模式下各中心路段的交通流量统计结果
此外,本文还进行了其他实验,以评估全局调度模式在不同自动驾驶车辆渗透率水平下(分别为车辆总数的25%、50%和75%)的性能。在新的实验中,考虑了几个假设。首先,人类驾驶车辆根据局部调度模式随机选择最短路径,且不考虑与其他人类驾驶车辆的避撞。其次,在确定人类驾驶车辆的路径后,根据全局调度模式规划自动驾驶车辆的路径,自动驾驶车辆单方面避开人类驾驶车辆。
表10列出了这些实验的结果。其中,“PenRate”表示自动驾驶车辆的渗透率,“Max”表示最大值,“Avg”表示平均值,“Var”表示方差。“Gap”的计算方法是所有路段的平均车辆数减去中心路段的车辆数。实验结果如下:① 随着人类驾驶车辆比例的降低(自动驾驶车辆的渗透率提高),所有路段与中心路段之间的平均交通流量差异逐渐减小。这一结果表明,全局调度模式有效地平衡了各路段的交通流量。②方差差异的逐渐增大表明,全局调度模式在减少各路段交通流量不平衡方面尤为有效。这进一步突出了该模式缓解交通流量波动的能力。
表10. 不同自动驾驶汽车渗透率下的交通流量

7.结论与展望
自动驾驶带来了交通领域的变革,对汽车工业、交通系统和城市发展产生了深远的影响。尽管当前自动驾驶还未能实现大范围落地应用,但探讨其发展路线、管理模式,有助于交通管理者制定自动驾驶的战略规划与布局,指导关键基础设施建设等重大工程项目的立项与落地,从而加速推进自动驾驶和智能交通系统的发展进程。鉴于此,本文从城市交通管理者视角,对城市自动驾驶交通展开研究。首先,本文分析了自动驾驶的现状,首次提出一种新的全局调度模式,旨在为未来的自动驾驶交通提供一种全新的调度方案。然后,详细阐述了该模式的运作机制、流程、前提条件及相关规则。为进一步阐明全局调度模式,本文将其定义为一个科学问题,并建立混合整数规划模型。同时,改进经典的A*算法进行求解。最后,通过实验验证了AVGSP模型及算法的有效性。此外,通过分析全局与局部两种调度模式下的路网运作情况,证明了全局调度模式在降低路段车流量、均衡路网资源分配方面具有显著优势。研究成果可为城市交通管理部门规划及管控未来交通提供决策支持。
尽管本文尽可能全面地论述基于自动驾驶的城市交通全局调度模式,但仍然存在局限性:①城市交通网络是一个随时空变化而动态变化的复杂系统。目前,本文所建立的数学模型及设计的算法,仅能决策新进入路网车辆的初始调度方案。未来,应当考虑实现已调度车辆行驶方案的实时更新与优化。例如,建立固定周期的路线更新机制,或者设置路口交通流量阈值,当路网车流量达到阈值时,更新部分已调度车辆的行驶路线。这些策略将大大增强城市道路网络的动态优化能力。②交叉口的多车避撞是本文的一个核心问题。然而,本文假设每两个路口之间,仅有两条方向相反的行驶车道,最终考虑了34种碰撞情况。实际上,路口之间的车道数通常有多个且不同路段车道数量不定。这种复杂性要求开发能够适应多种路况的避撞规则,未来的研究应考虑这些复杂的路况。例如,根据车道数,判断路口可容纳的同方向最大车辆数,并据此,结合路段等级和车道拥挤情况,决定车辆优先行驶顺序。③未来的研究可以进一步探讨城市路网分区的原则和方法。此外,城市道路路段和自动驾驶车辆的分级设置,自动驾驶车辆、智能路侧设备与行人的交互机制等也需要进一步研究。

扫描二维码阅读原文
参考文献
Alawadhi M, Almazrouie J, Kamil M, Khalil K A (2020). A systematic literature review of the factors influencing the adoption of autonomous driving. International Journal of System Assurance Engineering and Management, 11(6): 1065–1082 doi:10.1007/s13198-020-00961-4
Baidu Apollo (2022). Apollo robots took the lead in obtaining the road test license of Beijing intelligent Internet connected vehicle. Available at: https://www.apollo.auto/news/its/1503, 2023–4-29
Bansal P, Kockelman K M (2017). Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transportation Research Part A, Policy and Practice, 95: 49–63 doi:10.1016/j.tra.2016.10.013
Beijing Municipal Commission of Transport (2023). Beijings traffic operation during the “May Day” holiday was generally smooth and orderly. Available at: http://jtw.beijing.gov.cn/xxgk/dtxx/202305/t20230504_3086007.html, 2023–5-6
Bian Y, Li S E, Ren W, Wang J, Li K, Liu H X (2020). Cooperation of Multiple Connected Vehicles at Unsignalized Intersections: Distributed Observation, Optimization, and Control. IEEE Transactions on Industrial Electronics, 67(12): 10744–10754 doi:10.1109/TIE.2019.2960757
Bifulco G N, Coppola A, Petrillo A, Santini S (2024). Decentralized cooperative crossing at unsignalized intersections via vehicle-to-vehicle communication in mixed traffic flows. Journal of Intelligent Transport Systems, 28(2): 211–236 doi:10.1080/15472450.2022.2124868
Cascetta E, Cartenì A, Di Francesco L (2022). Do autonomous vehicles drive like humans? A Turing approach and an application to SAE automation Level 2 cars. Transportation Research Part C, Emerging Technologies, 134: 103499 doi:10.1016/j.trc.2021.103499
Chen X, Xu B, Qin X, Bian Y, Hu M, Sun N (2020). Non-Signalized Intersection Network Management With Connected and Automated Vehicles. IEEE Access : Practical Innovations, Open Solutions, 8: 122065–122077 doi:10.1109/ACCESS.2020.3007226
Chouhan A P, Banda G (2018). Autonomous Intersection Management: A Heuristic Approach. IEEE Access : Practical Innovations, Open Solutions, 6: 53287–53295 doi:10.1109/ACCESS.2018.2871337
Chow A H F, Sha R (2016). Performance Analysis of Centralized and Distributed Systems for Urban Traffic Control. Transportation Research Record: Journal of the Transportation Research Board, 2557(1): 66–76 doi:10.3141/2557-07
Czech P. (2018). Autonomous vehicles: basic issues. Scientific Journal of Silesian University of Technology- Series Transport, 100: 15–22
Dantsuji T, Hirabayashi S, Ge Q, Fukuda D (2020). Cross comparison of spatial partitioning methods for an urban transportation network. International Journal of Intelligent Transportation Systems Research, 18(3): 412–421 doi:10.1007/s13177-019-00209-x
Duarte F, Ratti C (2018). The Impact of Autonomous Vehicles on Cities: A Review. Journal of Urban Technology, 25(4): 3–18 doi:10.1080/10630732.2018.1493883
Fafoutellis P, Mantouka E G (2019). Major Limitations and Concerns Regarding the Integration of Autonomous Vehicles in Urban Transportation Systems. Advances in Intelligent Systems and Computing, 879: 739–747 doi:10.1007/978-3-030-02305-8_89
Fagnant D J, Kockelman K M (2015). Preparing a nation for autonomous vehicles: opportunities, barriers and policy recommendations. Transportation Research Part A, Policy and Practice, 77: 167–181 doi:10.1016/j.tra.2015.04.003
Fayazi S A, Vahidi A, Luckow A (2019). A Vehicle-in-the-Loop (VIL) verification of an all-autonomous intersection control scheme. Transportation Research Part C, Emerging Technologies, 107: 193–210 doi:10.1016/j.trc.2019.07.027
Fei X Y, Wang X M, Yu X, Feng Y H, Liu H, Shen S Q, Yin Y F (2023). Traffic signal control under stochastic traffic demand and vehicle turning via decentralized decomposition approaches. European Journal of Operational Research, 310(2): 712–736 doi:10.1016/j.ejor.2023.04.012
Gao Z, Huang H-J, Guo J, Yang L, Wu J (2023). Future urban transport management. Frontiers of Engineering Management, doi:10.1007/s42524-023-0255-3
Gkartzonikas C, Gkritza K (2019). What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transportation Research Part C, Emerging Technologies, 98: 323–337 doi:10.1016/j.trc.2018.12.003
Golbabaei F, Yigitcanlar T, Paz A, Bunker J (2020). Individual Predictors of Autonomous Vehicle Public Acceptance and Intention to Use: A Systematic Review of the Literature. Journal of Open Innovation, 6(4): 106 doi:10.3390/joitmc6040106
Google (2020). Waymo. Available at: https://waymo.com/, 2023–4-29
Greenblatt J B, Shaheen S (2015). Automated Vehicles, On-Demand Mobility and Environmental Impacts. Current Sustainable Renewable Energy Reports, 2(3): 74–81 doi:10.1007/s40518-015-0038-5
Guo H, Cao D, Chen H, Sun Z, Hu Y (2019). Model predictive path following control for autonomous cars considering a measurable disturbance: implementation, testing, and veri?cation. Mechanical Systems and Signal Processing, 118: 41–60 doi:10.1016/j.ymssp.2018.08.028
Haboucha C J, Ishaq R, Shiftan Y (2017). User preferences regarding autonomous vehicles. Transportation Research Part C, Emerging Technologies, 78: 37–49 doi:10.1016/j.trc.2017.01.010
He Z B, Liu C G, Chu X M, Negenborn R R, Wu Q (2022). Dynamic anti-collision A-star algorithm for multi-ship encounter situations. Applied Ocean Research, 118: 102995 doi:10.1016/j.apor.2021.102995
Heineke K, Heuss R, Kelkar A, Kellner M (2021). McKinsey&Company: Whats next for autonomous vehicles? Available at: https://www.mckinsey.com/features/mckinsey-center-for-future-mobility/our-insights/whats-next-for-autonomous-vehicles, 2023–4-29
Ho S S, Leow V J X, Leung Y W (2020). Driving without the brain? Effects of value predispositions, media attention, and science knowledge on public willingness to use driverless cars in Singapore. Transportation Research Part F: Traffic Psychology and Behaviour, 71: 49–61 doi:10.1016/j.trf.2020.03.019
Howard D, Dai D (2014). Public Perceptions of Self-Driving Cars: The Case of Berkeley, California. Available at: https://trid.trb.org/view/1289421, 2023–4-29
Janatabadi F, Ermagun A (2022). Empirical evidence of bias in public acceptance of autonomous vehicles. Transportation Research Part F: Traffic Psychology and Behaviour, 84: 330–347 doi:10.1016/j.trf.2021.12.005
Ju C, Luo Q, Yan X (2020). Path Planning Using an Improved A-star Algorithm. In: 2020 11th International Conference on Prognostics and System Health Management (PHM-2020 Jinan), Jinan: Institute of Electrical and Electronics Engineers (IEEE), 23–26 doi: 10.1109/PHM-Jinan48558.2020.00012.
Kaur K, Rampersad G (2018). Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. Journal of Engineering and Technology Management, 48: 87–96 doi:10.1016/j.jengtecman.2018.04.006
Khattak Z H, Smith B L, Park H, Fontaine M D (2020). Cooperative lane control application for fully connected and automated vehicles at multilane freeways. Transportation Research Part C, Emerging Technologies, 111: 294–317 doi:10.1016/j.trc.2019.11.007
Koopman P, Wagner M (2017). Autonomous vehicle safety: an interdisciplinary challenge. IEEE Intelligent Transportation Systems Magazine, 9(1): 90–96 doi:10.1109/MITS.2016.2583491
Kyriakidis M, Happee R, de Winter J C F (2015). Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transportation Research Part F: Traffic Psychology and Behaviour, 32: 127–140 doi:10.1016/j.trf.2015.04.014
Lam A Y S, Leung Y W, Chu X W (2016). Autonomous-Vehicle Public Transportation System: Scheduling and Admission Control. IEEE Transactions on Intelligent Transportation Systems, 17(5): 1210–1226 doi:10.1109/TITS.2015.2513071
Leclercq L, Ladino A, Becarie C (2021). Enforcing optimal routing through dynamic avoidance maps. Transportation Research Part B: Methodological, 149: 118–137 doi:10.1016/j.trb.2021.05.002
Li J J, Yu C H, Shen Z L, Su Z C, Ma W J (2023). A survey on urban traffic control under mixed traffic environment with connected automated vehicles. Transportation Research Part C: Emerging Technologies, 154, 104258 doi:10.1016/j.trc.2023.104258.
Li P F, Zhou X S (2017). Recasting and optimizing intersection automation as a connected-and-automated-vehicle (CAV) scheduling problem: A sequential branch-and-bound search approach in phase-time-traffic hypernetwork. Transportation Research Part B: Methodological, 105: 479–506 doi:10.1016/j.trb.2017.09.020
Lipson H, Kurman M (2016). Driverless: Intelligent Cars and the Road Ahead. Cambridge: MIT Press
Liu C, Zhang Y, Zhang T, Wu X, Gao L, Zhang Q (2020). High Throughput Vehicle Coordination Strategies at Road Intersections. IEEE Transactions on Vehicular Technology, 69(12): 14341–14354 doi:10.1109/TVT.2020.3029933
Liu H, Yang R, Wang L, Liu P (2019). Evaluating initial public acceptance of highly and fully autonomous vehicles. International Journal of Human-Computer Interaction, 35(11): 919–931 doi:10.1080/10447318.2018.1561791
Ma Y, Li Z, Sotelo M A (2020). Testing and Evaluating Driverless Vehicles’ Intelligence: The Tsinghua Lion Case Study. IEEE Intelligent Transportation Systems Magazine, 12(4): 10–22 doi:10.1109/MITS.2020.3014432
Milakis D B, Arem v, Wee B V (2017). Policy and society related implications of automated driving: A review of literature and directions for future research. Journal of Intelligent Transport Systems, 21(4): 324–348 doi:10.1080/15472450.2017.1291351
Morando M M, Tian Q, Truong L T, Vu H L (2018). Studying the safety impact of autonomous vehicles using simulation-based surrogate safety measures. Journal of Advanced Transportation, 2018: 1–11 doi:10.1155/2018/6135183
Mordue G, Yeung A, Wu F (2020). The looming challenges of regulating high level autonomous vehicles. Transportation Research Part A, Policy and Practice, 132: 174–187 doi:10.1016/j.tra.2019.11.007
Narayanan S, Chaniotakis E, Antoniou C (2020). Shared autonomous vehicle services: a comprehensive review. Transportation Research Part C, Emerging Technologies, 111: 255–293 doi:10.1016/j.trc.2019.12.008
National Bureau of Statistics (2018). Xu Jianyi: in 2017, the service industry grew steadily and rapidly, and the quality and efficiency were improved. Available at: http://www.stats.gov.cn/xxgk/jd/sjjd2020/201801/t20180121_1765026.html, 2023–4-29
Paden B, ?áp M, Yong S Z, Yershov D, Frazzoli E (2016). A Survey of Motion Planning and Control Techniques for Self-Driving Urban Vehicles. IEEE Transactions on Intelligent Vehicles, 1(1): 33–55 doi:10.1109/TIV.2016.2578706
Pan X, Chen B, Timotheou S, Evangelou S A (2023). A Convex Optimal Control Framework for Autonomous Vehicle Intersection Crossing. IEEE Transactions on Intelligent Transportation Systems, 24(1): 163–177 doi:10.1109/TITS.2022.3211272
Panagiotopoulos I, Dimitrakopoulos G (2018). An empirical investigation on consumers’ intentions towards autonomous driving. Transportation Research Part C, Emerging Technologies, 95: 773–784 doi:10.1016/j.trc.2018.08.013
Piao J, Mcdonald M, Hounsell N, Graindorge M, Graindorge T, Malhene N (2016). Public Views towards Implementation of Automated Vehicles in Urban Areas. Transportation Research Procedia, 14: 2168–2177 doi:10.1016/j.trpro.2016.05.232
Pigeon C, Alauzet A, Paire-Ficout L (2021). Factors of acceptability, acceptance and usage for non-rail autonomous public transport vehicles: A systematic literature review. Transportation Research Part F: Traffic Psychology and Behaviour, 81: 251–270 doi:10.1016/j.trf.2021.06.008
Rezaei A, Caulfield B (2020). Examining public acceptance of autonomous mobility. Travel Behaviour & Society, 21: 235–246 doi:10.1016/j.tbs.2020.07.002
Rosell J, Allen J (2020). Test-riding the driverless bus: Determinants of satisfaction and reuse intention in eight test-track locations. Transportation Research Part A, Policy and Practice, 140: 166–189 doi:10.1016/j.tra.2020.08.013
SAE (2016). Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles J3016_201609. Available at: https://www.sae.org/standards/content/j3016_201609/, 2023–4-29
Schneble C O, Shaw D M (2021). Driver’s views on driverless vehicles: Public perspectives on defining and using autonomous cars. Transportation Research Interdisciplinary Perspectives, 11:100446 doi:10.1016/j.trip.2021.100446
Sener I N, Zmud J, Williams T (2019). Measures of baseline intent to use automated vehicles: a case study of Texas cities. Transportation Research Part F: Traffic Psychology and Behaviour, 62: 66–77 doi:10.1016/j.trf.2018.12.014
Shao Y, Mohd Zulkefli M A, Sun Z, Huang P (2019). Evaluating connected and autonomous vehicles using a hardware-in-the-loop testbed and a living lab Transportation Research Part C, Emerging Technologies, 102: 121–135 doi:10.1016/j.trc.2019.03.010
Sparrow R, Howard M (2017). When human beings are like drunk robots: Driverless vehicles, ethics, and the future of transport. Transportation Research Part C, Emerging Technologies, 80: 206–215 doi:10.1016/j.trc.2017.04.014
Tesla (2016). All Tesla Cars Being Produced Now Have Full Self-Driving Hardware. Available at: https://www.tesla.com/de_CH/blog/all-tesla-cars-being-produced-now-have-full-self-driving-hardware, 2023–4-29
Walinchus R J (1971). Real-time network decomposition and subnetwork interfacing. Highway Research Record, 366: 20–28
Wulfraat M (2012). Is Kiva Systems a Good Fit for Your Distribution Center? An Unbiased Distribution Consultant Evaluation. Available at: http://www.mwpvl.com/html/kiva_systems.html, 2023–4-29
Xu B, Chen X, Li K, Hu M, Bian Y, Yu Q, Wang J (2019). Double-layer speed optimization for reducing fuel consumption with vehicle-to-infrastructure communication. Journal of Intelligent Transport Systems, 23(5): 513–524 doi:10.1080/15472450.2019.1578565
Xu P, Dherbomez G, Hery E, Abidli A, Bonnifait P (2018a). System Architecture of a Driverless Electric Car in the Grand Cooperative Driving Challenge. IEEE Intelligent Transportation Systems Magazine, 10(1): 47–59 doi:10.1109/MITS.2017.2776135
Xu Z, Zhang K, Min H, Wang Z, Zhao X, Liu P (2018b). What drives people to accept automated vehicles? Findings from a ?eld experiment. Transportation Research Part C, Emerging Technologies, 95: 320–334 doi:10.1016/j.trc.2018.07.024
Yao H D, Li X P (2020). Decentralized control of connected automated vehicle trajectories in mixed traffic at an isolated signalized intersection. Transportation Research Part C, Emerging Technologies, 121: 102846 doi:10.1016/j.trc.2020.102846
Zhang T, Tao D, Qu X, Zhang X, Lin R, Zhang W (2019). The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transportation Research Part C, Emerging Technologies, 98: 207–220 doi:10.1016/j.trc.2018.11.018
Zhang Z, Jiang J, Wu J, Zhu X Z (2023). Efficient and optimal penetration path planning for stealth unmanned aerial vehicle using minimal radar cross-section tactics and modified A-Star algorithm. ISA Transactions, 134: 42–57 doi:10.1016/j.isatra.2022.07.032
Zheng L, Li B, Yang B, Song H, Lu Z (2019). Lane-level road network generation techniques for lane-level maps of autonomous vehicles: a survey. Sustainability (Basel), 11(16): 4511 doi:10.3390/su11164511
Zmud J, Sener I, Wagner J (2016). Self-Driving Vehicles: Determinants of Adoption and Conditions of Usage. Transportation Research Record: Journal of the Transportation Research Board, 2565(1): 57–64 doi:10.3141/2565-07
Zou X, Logan D B, Vu H L (2022). Modeling public acceptance of private autonomous vehicles: Value of time and motion sickness viewpoints. Transportation Research Part C, Emerging Technologies, 137: 103548 doi:10.1016/j.trc.2021.103548
推荐阅读
1.FEM Dec 2024, Volume 11 Issue 4下一代智慧交通系统—构想一个碳中和、互联、智能、公平的交通专题摘要
2.重大基础设施项目可供性:一种改善利益相关者管理和项目可持续的新视角
3.专刊: 下一代智慧交通系统—构想一个碳中和、互联、智能、公平的交通
4.FEM Sep 2024, Volume 11 Issue 3 内容摘要
5.FEM Jun 2024, Volume 11 Issue 2 内容摘要
6.FEM Mar 2024, Volume 11 Issue1 内容摘要
《前沿》系列英文学术期刊
由教育部主管、高等教育出版社主办的《前沿》(Frontiers)系列英文学术期刊,于2006年正式创刊,以网络版和印刷版向全球发行。系列期刊包括基础科学、生命科学、工程技术和人文社会科学四个主题,是我国覆盖学科最广泛的英文学术期刊群,其中13种被SCI收录,其他也被A&HCI、Ei、MEDLINE或相应学科国际权威检索系统收录,具有一定的国际学术影响力。系列期刊采用在线优先出版方式,保证文章以最快速度发表。
中国学术前沿期刊网
http://journal.hep.com.cn

特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






