|
|
|
|
|
FME 文章速览 | 四足机器人节能型腿部弹性并联关节的动态柔顺性:设计与实现 |
|
|
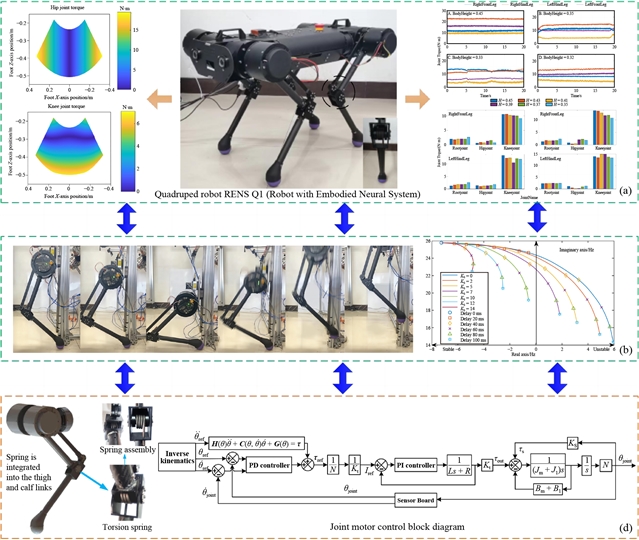
论文标题:Dynamic compliance of energy-saving legged elastic parallel joints for quadruped robots: design and realization
期刊: Frontiers of Mechanical Engineering
作者:Yaguang ZHU, Minghuan ZHANG, Xiaoyu ZHANG, Haipeng QIN
发表时间:15 Apr 2024
DOI:10.1007/s11465-024-0784-4
微信链接:点击此处阅读微信文章
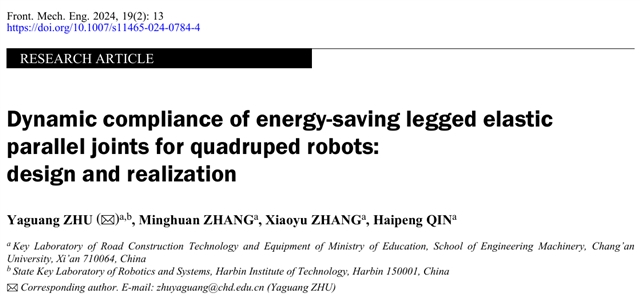
本篇研究论文发表于《Frontiers of Mechanical Engineering》2024年19卷第2期,题为“Dynamic compliance of energy-saving legged elastic parallel joints for quadruped robots: design and realization”。文章聚焦于四足机器人节能腿部弹性并联关节的动态柔顺性设计与实现。研究指出,实现节能型腿式机器人运动的动态柔顺性是长期挑战,现有基于单刚体模型的预测控制方法假设能量无限,不适合机器人长时间运行,需要兼具能量存储的机械结构和融入反馈以确保稳定性的动态控制策略。受生物肌肉-肌腱网络效率启发,文章提出可控扭簧腿结构,该设计融合弹簧加载倒立摆(SLIP)模型,采用反馈延迟和屈服弹簧增强延迟效果。研究还开发了包含电机负载的腿部控制模型,以验证弹性关节腿的响应和动态性能,该模型为膝关节提供扭矩,通过主动或被动控制策略有效降低机器人能耗。实验在真实场景中演示了所提方法对四足机器人腿部敏捷操控的益处,验证了弹性关节腿的动态运动性能及节能优势。此外,文章介绍了四足机器人腿部结构建模、柔性关节控制模型及膝关节节能原理,通过腿部运动和负载性能测试,包括整机腿部性能测试和能耗分析,进一步验证了设计的有效性。
关键词
动态响应性;能量耗散;腿式运动;平行关节;四足机器人
引用
Yaguang ZHU(朱雅光), Minghuan ZHANG(张明换), Xiaoyu ZHANG(张小雨), Haipeng QIN(秦海鹏). Dynamic compliance of energy-saving legged elastic parallel joints for quadruped robots: design and realization. Front. Mech. Eng., 2024, 19(2): 13
https://doi.org/10.1007/s11465-024-0784-4
扫描二维码阅读原文

文章作者简介

朱雅光,教授,博士生导师,工程机械学院工程机械系系主任,先进控制与机器人研究所副所长。博士毕业于浙江大学机械学院机械电子工程专业;南丹麦大学Embodied Systems for Robotics and Learning Lab访问学者。主要研究方向为机器人和机电系统的仿生理论与协同技术。
先后主持“十三五”装备预研共用技术和领域基金、国家自然科学基金、中国博士后特别资助、陕西省重点研发计划等项目20余项。近五年,以第一/通讯作者在IEEE Trans. Cybern.等刊物上发表学术论文52篇(其中SCI收录25篇,中国科学院一区TOP期刊3篇),单篇最高影响因子19.118;结合产学研合作,为企业设计研制完成各类功能的特种机器人11台,解决了多项冗繁自由度机器人协调作业控制问题,以第一、二作者授权专利42项,其中发明专利14项。
现任教育部重点实验室副主任,兼任中国机械工程协会自动化分会委员、NSFC通讯评审专家,兼任Front. Neurorobot.(SCI)编辑/专题主编、《制造业自动化》青年编委、IIRE期刊编委、CCES期刊编委和中国机械工程协会高级会员等,作为分会主席、组委会、技术委员会成员多次服务于ICARM、RCAE、ICCAR等7个国际会议。担任Nature子刊Nat. Mach. Intell., 中国科学院一区top期刊Mech. Mach. Theory,等50多个国内外著名SCI期刊审稿人。长期致力于解决实际工程中的多自由度协同困难、耦合复杂、效率低下的问题。组建长安大学工程机器人与无人装备协同技术团队,先后为30多家科研院所和企业提供关键问题解决方案和技术支持。
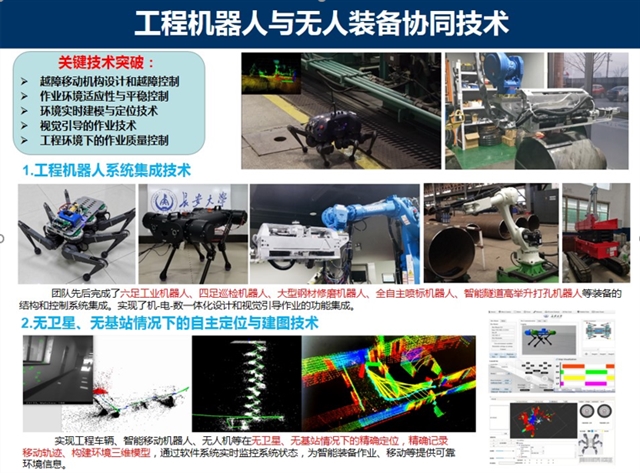
团队成果
精彩推荐
1.FME文章速览 | 多材料增材制造——通过激光粉末床熔融过程中的激光重熔实现功能梯度材料
2.FME文章速览 | 考虑运动不确定性的四轮移动机器人避障自适应控制
3.FME文章速览 | 通过新型自适应关节和协同策略增强多移动机器人协同搬运系统的地形适应性
4.FME文章速览 | 用于具有可编程磁排列柔性致动器的多材料磁场辅助增材制造系统
5.FME文章速览 | 高速行星探测车的设计方法、综合与控制策略
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






