|
|
|
|
|
Remote Sensing:院士文章精选 (二) | MDPI 编辑荐读 |
|
|
期刊链接:https://www.mdpi.com/journal/remotesensing
微信链接:
https://mp.weixin.qq.com/s?__biz=MzI1MzEzNjgxMQ==&mid=2650042338&idx=2&sn=
1cc7dfec49348766fa34d9cfd9be7f87&chksm=f1d9d526c6ae5c30e9f6fb2e3d71221267
53991f5d3cc6c8d33aa0dc33afba407019651219d7&token=1387611467&lang=zh_CN#rd
武汉大学刘经南院士长期从事于大地测量理论及应用的研究与教学工作,在多个相关领域做出了开创性贡献。其中,在全球导航卫星系统 (Global Navigation Satellite System, GNSS) 技术的应用领域成就尤为显著。本期推文精选了刘经南院士团队发表于Remote Sensing期刊的五篇GNSS领域文章,希望能深化各位读者对于GNSS的认识与理解,同时欢迎相关领域研究人员与从业人员共同探讨交流。
文章推荐
1. A LSTM Algorithm Estimating Pseudo Measurements for Aiding INS during GNSS Signal Outages
一种LSTM算法估计伪测量以在GNSS信号中断期间辅助INS
Wei Fang et al.
DOI:10.3390/rs12020256
耦合全球导航卫星系统 (GNSS) /惯性导航系统 (INS) 组合导航系统 KF-卡尔曼滤波器。
为优化GNSS故障期间的导航精度,本文提出了一种基于长短期记忆 (Long Short-Term Memory, LSTM) 的惯性导航系统 (Inertial Navigation System, INS) 辅助算法。本文研究了LSTM算法以生成替代GNSS信号的伪GNSS位置增量。几乎所有现有的INS辅助算法,如多层感知器神经网络 (MLP),都是基于对INS误差和INS输出进行建模,忽略了过去车辆动态信息的依赖性,导致导航精度较差。而LSTM是一种动态神经网络,它构建了现在和过去信息之间的关系。因此在GNSS中断期间,采用LSTM算法可以获得更稳定和可靠的导航解决方案。测试结果表明,在180s的GNSS中断期间,LSTM算法的导航精度比纯INS算法提高了95%,比MLP算法提高了50%。
2. Improved IMU Preintegration with Gravity Change and Earth Rotation for Optimization-Based GNSS/VINS
以重力变化和地球自转提升IMU预积分用于基于优化的GNSS/VINS
Junxiang Jiang, Xiaoji Niu and Jingnan Liu
DOI:10.3390/rs12183048

地球模型和相关坐标系。
IMU预积分技术首次提出以来,相关研究中通过改变姿态参数化或数值积分方法设计了多个改进版本,但仍忽略了重力和地球自转的变化影响。本文从大地位置计算地球自转和重力矢量,重新设计了IMU预积分算法。与协方差矩阵形式相比,预积分IMU测量的不确定性以平方根信息矩阵 (Square Root Information Matrix, SRIM) 的形式传播,可以获得更好的数值稳定性并易于在优化框架中使用。本文使用了配备两个不同等级IMU的传感器平台收集的数据集来评估改进的IMU预积分算法。结果表明,改进的IMU预积分算法能够很好地应对重力变化和地球自转。对于能够有效感知地球自转的高级IMU,必须考虑地球自转。如果忽略重力变化,水平姿态的均方根误差 (Root-Mean-Square Error, RMSE) 大约是大地位移的 1.38 倍。
3. GNSS Receiver-Related Pseudorange Biases: Characteristics and Effects on Wide-Lane Ambiguity Resolution
GNSS 接收器相关的伪距偏差:特征和对宽通道模糊度分辨率的影响
Lingyue Cheng et al.
DOI:10.3390/rs13030428
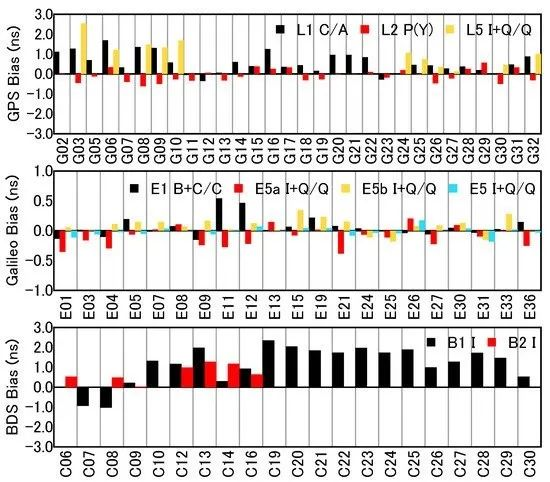
GPS (上)、Galileo (中) 和 BDS (下) 的基线 MAR6_MAR7 的接收机相关伪距偏差,该基线配备了 SEPTENTRIO 和 TRIMBLE 接收器。
卫星芯片形状失真导致伪距测量中的信号跟踪误差,称为接收机相关伪距偏差。为了评估全球定位系统 (GPS)、伽利略导航卫星系统 (Galileo) 和北斗导航卫星系统 (BDS) 的接收机相关伪距偏差特性,本文测试了来自多GNSS实验 (MGEX) 网络的七个短基线。结果表明,对于使用相同TRIMBLE接收机的基线,相同天线的伪距偏差在±0.2 ns之内,而不同天线的伪距偏差范围增加到±0.6 ns。对于混合接收器类型的基线,伪距偏差最高可达2.5 ns。GPS、Galileo与BDS中,Galileo的伪距偏差最小,BDS-2和BDS-3、伽利略在轨验证 (IOV) 卫星和全运行配置 (FOC) 卫星之间存在明显的伪距偏差不一致。为了验证与接收器相关的伪距偏差,研究使用短基线进行相对定位实验。结果表明,经过偏置校正后,水平和垂直分量的位置误差均方根值分别降低了12.6%和11.4%。
4. Dynamic Adaptive Low Power Adjustment Scheme for Single-Frequency GNSS/MEMS-IMU/Odometer Integrated Navigation in the Complex Urban Environment
复杂城市环境下单频GNSS/MEMS-IMU/里程计集成导航的动态自适应低功耗调整方案
Peihui Yan et al.
DOI:10.3390/rs13163236

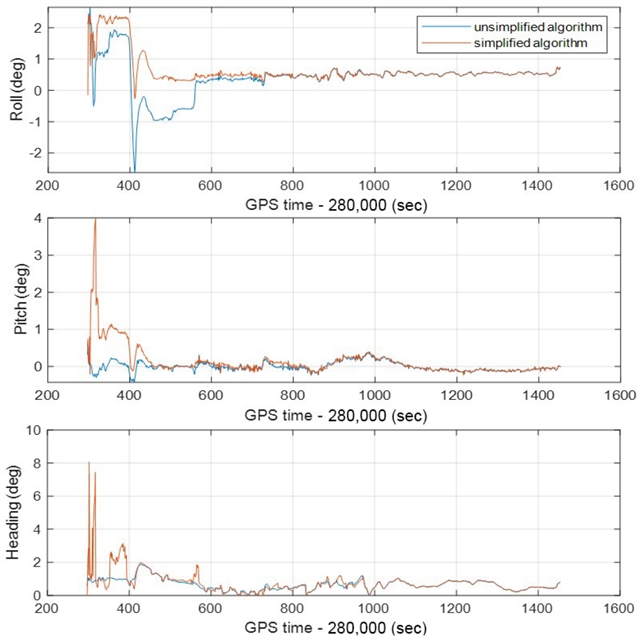
整个实验路线中非简化和简化组合导航算法的实时姿态误差。
定位精度与功耗是组合导航定位芯片重要的性能指标。本文提出一种复杂环境下动态功率自适应调节的单频GNSS/MEMS-IMU/里程计实时高精度组合导航算法。它是在多传感器融合导航系统级封装 (System in Package, SiP) 芯片中实现。采用简化INS算法和简化卡尔曼滤波算法降低计算量,并结合自适应调整数据速率和选择不同场景和运动模式下测量更新的观测信息的策略,实现复杂场景下的高精度定位和低功耗。通过在各种复杂城市环境下的实时车辆实验验证了算法的性能。结果表明,全路段整体定位误差RMS统计值为0.312m,整体平均功耗为141mW,满足实时组合导航对高精度定位和低功耗的要求。
5. Multipath Error Fusion Modeling Methods for Multi-GNSS
Multi-GNSS的多径误差融合建模方法
Xuan Zou et al.
DOI:10.3390/rs13152925

GPS、BDS和Galileo在2018年与2020年基于广播星历数据的每日时移散点图。(a) GPS MEO 卫星的时移; (b) BDS2 和 BDS3 的 GEO 和 IGSO 卫星的时移; (c) BDS2 和 BDS3 的 MEO 卫星的时移; (d) 伽利略 MEO 卫星的时移。
恒星滤波 (Sidereal Filtering, SF) 方法可用于减轻观测域的多径误差,其性能依赖于不同系统甚至不同类型星座中卫星的明确轨道重复周期。本文修改了空间域多径误差减少方法,使用模糊度固定期间双差载波相位观测的残差建立多点半球网格模型 (Multi-point Hemispherical Grid Model, MHGM)。为了从多GNSS的角度比较MHGM和SF的性能,研究总结了通过广播星历确定轨道重复周期的方法,并将SF方法扩展到全球北斗卫星导航系统 (BDS3) 和伽利略导航卫星系统。从均方根和双差分残差的功率谱分析以及静态定位结果来看,MHGM和SF的性能具有可比性。即空间域MHGM可以在观测域获得与SF方法类似的校正效果,但前者对于使用各种系统的数据进行建模更灵活。此外,利用多轨道周期数据建立的MHGM比仅利用一个轨道周期数据建立的MHGM性能更好,双差残差均方根平均提高13.1%。
Remote Sensing 期刊介绍
主编:Prasad S. Thenkabail, USGS Western Geographic Science Center (WGSC), USA
期刊范围涵盖遥感科学所有领域,从传感器的设计、验证和校准,到遥感在地球科学、环境生态、城市建筑等各方面的广泛应用。期刊于今年6月收获了新的IF 4.848,并于今年被三个新的Category*收录。
2020 Impact Factor: 4.848
2020 CiteScore: 6.6
Time to First Decision: 16.1 Days
Time to Publication: 40 Days
Category:* Geosciences, Multidisciplinary (Q1); Environmental Sciences (Q2); Imaging Science&Photographic Technology (Q2);


特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。