|
|
|
|
|
一种应用于野外大规模复杂地形环境的高效路径规划算法 | MDPI ISPRS IJGI |
|
|
论文标题:A Pathfinding Algorithm for Large-Scale Complex Terrain Environments in the Field
论文链接:https://www.mdpi.com/2220-9964/13/7/251
期刊名:ISPRS International Journal of Geo-Information
期刊主页:https://www.mdpi.com/journal/ijgi
近年来,随着移动机器人和人工智能技术的飞速发展,自动驾驶车辆在物资运输、地质勘探等军民领域应用日益广泛。然而,在缺少完整路网数据的野外大规模复杂地形环境中,如何为车辆快速规划出一条兼具高通行可靠性和短行驶时间的最优路径,成为了一个极具挑战性的课题。来自东南大学交通学院的蒉露超及其导师于先文教授在地理信息领域知名期刊 ISPRS International Journal of Geo-Information 上发表了最新研究成果,提出了一种名为 RHA* 的分层路径规划算法,旨在解决大规模复杂地形环境中的路径规划难题,平衡规划效率与路径质量。
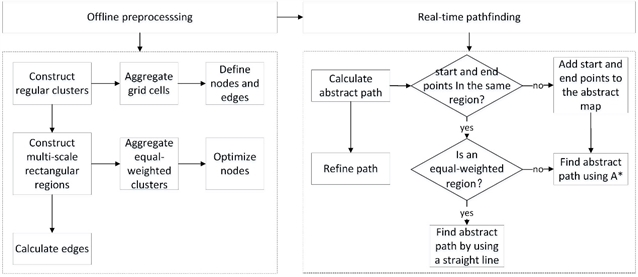
算法流程图
研究过程与结果
经典的 A* 算法虽然能保证找到最优路径,但在大范围地图中搜索效率会急剧下降;而已有的分层路径规划算法 (如 HPA*) 虽然提升了效率,但生成的路径与最优路径偏差较大,且在存在大量连续统一地形 (如草原) 的环境中,会将这些区域不必要地分割,反而降低了效率。
为解决以上问题,本研究提出的 RHA* 算法对现有的分层抽象地图构建方法进行了改进。该算法首先将原始地图的栅格单元聚合为固定大小的簇,然后进一步将权值相同的簇聚合为不同尺寸的矩形区域,从而构建一个抽象地图。这种方法能够充分聚合野外环境中的等权值区域。最后,通过改进节点选择策略和优化搜索算法,大幅提升路径实时搜索效率。
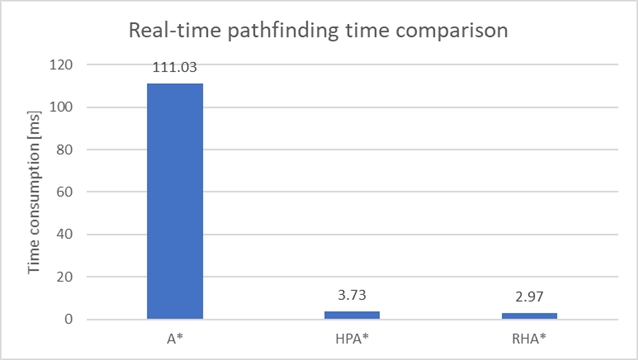
路径实时搜索耗时对比
实验结果表明,RHA* 算法的性能表现卓越。在实时路径规划方面,其计算时间相较于 A* 算法减少了96.64%,相较于 HPA* 算法减少了20.38%。在路径质量方面,其生成路径的总成本与 A* 算法计算出的最优路径相比,偏差不超过0.05%,该偏差值比 HPA* 算法降低了99.2%。
研究总结
本文提出的 RHA* 算法通过构建基于多尺度矩形区域的抽象地图,成功地在实时路径规划效率和生成路径质量之间取得了平衡。该算法不仅保证了高效率,还显著缩小了其生成路径与最优路径之间的成本偏差。这项研究成果能够直接应用于野外环境下的无人车自主行驶,有效解决了野外大规模复杂地形环境中的实时路径规划难题。
ISPRS International Journal of Geo-Information 期刊介绍
主编:Wolfgang Kainz, University of Vienna, Austria
期刊主题涵盖地理信息科学和技术各个方面,主要包括空间数据模型与管理、空间分析与决策、地理空间人工智能、地图制图、空间数据基础设施、地理空间网络、志愿地理信息、基于位置的服务、轨迹分析、智慧城市和前沿地理空间应用等。
|
2024 Impact Factor
|
2.8
|
|
2024 CiteScore
|
7.2
|
|
Time to First Decision
|
33.1 Days
|
|
Acceptance to Publication
|
2.7 Days
|
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






