|
|
|
|
|
新研究提出群体交互场概念,助力无人系统理解行人意图 Engineering |
|
|
论文标题:The Group Interaction Field for Learning and Explaining Pedestrian Anticipation
期刊:Engineering
DOI:https://doi.org/10.1016/j.eng.2023.05.020
微信链接:点击此处阅读微信文章
清华大学方璐研究团队在中国工程院院刊《Engineering》发表题为 “The Group Interaction Field for Learning and Explaining Pedestrian Anticipation” 的研究性文章。该研究提出群体交互场(GIF)这一新颖概念,为理解行人意图提供了新视角,有望推动无人系统与行人的和谐交互。共同第一作者为王雪扬、陈学诚、蒋朴华、林浩哲。
在城市环境中,无人系统如服务机器人、自动驾驶汽车等,若要安全高效运行,精准预测行人意图至关重要。过往的行人意图建模方法,像双向流、细胞自动机、碰撞时间等,以及近期的机器学习技术,大多聚焦于个体避免碰撞行为,忽视了群体相关社会行为的影响。而实际上,人群中约 70% 的行人存在群体行为,群体内 / 群体间的互动对行人行为模式影响显著。但群体行为影响复杂微妙,现有方法难以准确预测群体行为影响下的行人意图。
此次研究提出的群体交互场(GIF),由空间位置场和注意力场组成,通过行人未来位置和注意力方向的概率场,量化隐含的行人意图。研究团队还设计了端到端的神经网络 GIFNet,用于从行人轨迹、注视方向和群体交互状态等显性多维观察中预测 GIF。
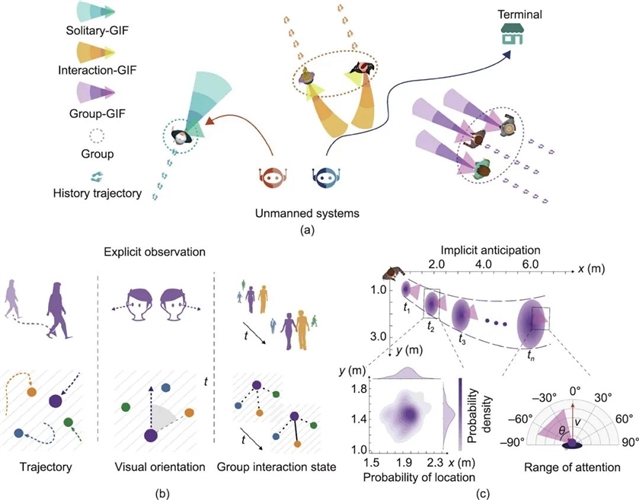
图1. 群体交互场(GIF)。(a)GIF表征隐含的行人意图,它由一个空间位置场和一个注意力场组成,根据显式观察进行估计。(b)显式观察由轨迹、注视方向和可观察的群体交互状态组成。(c)空间位置场和注意力场分别由二维(2D)概率分布图序列和角度范围序列表示。(a)部分演示了两种代表性应用。GIF可以帮助无人系统避免打扰行人或吸引行人的注意力。t1, t2,…, tn :来自预测序列的时间戳;n:第n个时间戳;v:步行速度;θ:注意力场的角度范围。
GIFNet 包含轨迹编码器、注视方向编码器、GIF-GAT 和空间及注意力解码器四个模块。轨迹编码器对目标行人历史轨迹信息编码生成轨迹嵌入;注视方向编码器对历史注视方向信息编码生成注视方向嵌入;GIF-GAT 利用图注意力机制,结合相邻行人轨迹和群体交互图,量化群体行为影响;空间和注意力解码器则基于各模块提取的特征,生成空间位置场和注意力场。
研究人员在 PANDA 数据集上对模型性能进行评估,采用平均位移误差(ADE)、最终位移误差(FDE)评估预测轨迹,用平均角度误差(AAE)、最终角度误差(FAE)评估预测注视方向。实验结果显示,GIFNet 在预测行人未来位置和注视方向上,性能优于 SoPhie、时空图注意力网络(STGAT)等先进的基于学习的轨迹预测方法。
进一步的消融分析表明,群体和群体交互的有效编码,以及同时对行人轨迹和注视方向信息的编码,有助于提高预测准确性。此外,研究人员还测试了基于群体检测算法的 GIFNet,结果显示相关算法能有效提升其预测精度,这表明该算法在现实世界中具有可用性。
在机器人导航应用场景中,基于 GIF 的导航方法能让机器人根据行人空间位置场和注意力场自适应规划路径,在保障驾驶效率的同时,有效避免干扰行人。
该研究成果有助于无人系统更准确地预测行人行为,实现与行人安全、舒适的交互,在智能无人驾驶、行人动力学研究、紧急疏散等领域具有广阔的应用前景。
文章信息:
The Group Interaction Field for Learning and Explaining Pedestrian Anticipation
学习和解释行人意图的群体交互场
作者:
王雪扬#, 陈学诚#, 蒋朴华#, 林浩哲#, 袁肖赟, 季梦奇, 郭雨晨, 黄儒麒, 方璐*
引用:
Xueyang Wang, Xuecheng Chen, Puhua Jiang, Haozhe Lin, Xiaoyun Yuan, Mengqi Ji, Yuchen Guo, Ruqi Huang, Lu Fang. The Group Interaction Field for Learning and Explaining Pedestrian Anticipation. Engineering, 2024, 34(3): 70–82
开放获取论文:
https://doi.org/10.1016/j.eng.2023.05.020
更多内容
吕跃广、吴飞:迈向更通用赋能的人工智能
人工智能的发展:实现数据集、AI模型、建模软件和硬件体系逻辑结构的一致性?
北航向锦武院士团队研发直升机驾驶机器人 推动有人飞行器无人化进程
研究揭示黄河流域植被与降雨关系,为生态恢复提供重要参考
Engineering征稿启事:人工智能赋能工程科技
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






