|
|
|
|
|
FME文章荐读 | 基于运动虚拟中心机构的连续体机器人设计与建模 |
|
|
论文标题:Design and modeling of continuum robot based on virtual-center of motion mechanism
期刊: Frontiers of Mechanical Engineering
作者:Guoxin LI, Jingjun YU, Yichao TANG, Jie PAN, Shengge CAO, Xu PEI
发表时间:15 Jun 2023
DOI:10.1007/s11465-022-0739-6
微信链接:点击此处阅读微信文章
连续体机器人凭借多自由度与高柔顺性的结构优势,在微创手术、航空检修、核电设备维护等狭窄复杂空间作业场景中展现出巨大应用潜力。然而,传统连续体机器人常受限于关节装配误差、弯曲角度不足及建模精度低等问题,难以满足高精度作业需求。
《Frontiers of Mechanical Engineering》2023年第18卷第2期的研究论文“Design and modeling of continuum robot based on virtual-center of motion mechanism”,提出一种基于运动虚拟中心(VCM)机构的连续体机器人设计方案,通过一体化柔性关节设计与伪刚体(PRB)建模,有效突破传统技术瓶颈。
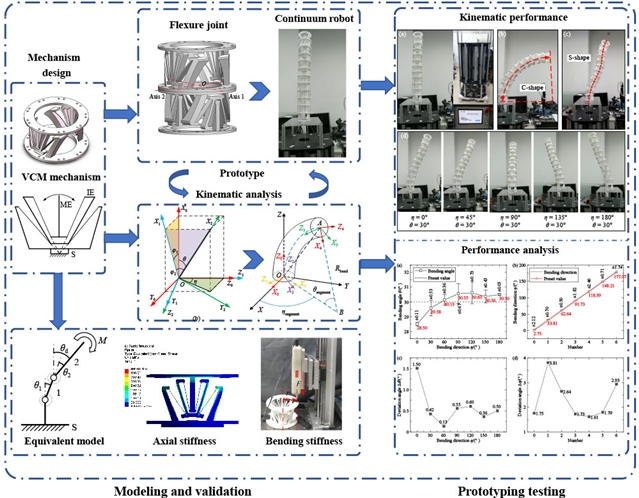
在核心结构设计上,该方案以双叶片式等腰梯形柔性铰链(D-LITFP)为基础构建VCM机构。D-LITFP由两个叶片式等腰梯形柔性铰链(LITFP)串联叠加而成,通过将两个LITFP的瞬时旋转中心(ICR)重合,形成固定旋转轴,实现单自由度大行程转动。同时,采用平行布置的D-LITFP结构提升整体刚度,且VCM机构可一体化加工,无需关节装配,显著降低装配误差,确保弯曲变形均匀性。
建模分析层面,研究将叶片的PRB模型扩展至VCM机构,建立刚度与行程的数学模型。通过推导LITFP在纯弯矩作用下的力学方程,得出等效单铰模型的刚度计算公式,并结合材料屈服强度,确定D-LITFP的最大旋转角度。参数优化结果显示,当LITFP1与LITFP2的结构参数分别为t=0.6mm、b=9mm、H=55mm/46mm时,VCM机构的复合刚度达6.92N?m/rad,最大行程约14.2°,轴向抗压刚度达1915N/mm,可承受至少1800N的轴向压力。
运动学分析与性能验证环节,研究基于分段常曲率理论,建立驱动绳长差与关节弯曲姿态的映射关系,通过Denavit-Hartenberg参数法构建单段及整体机器人的位姿变换矩阵。有限元分析(FEA)与实验结果表明,PRB模型计算值与仿真、实验数据的相对误差均小于10%;3D打印PLA材质的 VCM机构最大弯曲角度达29.6°,满足设计验证需求。所设计的连续体机器人,其弯曲角度重复定位精度约±1.47°,弯曲方向重复定位精度约 ±2.46°,可实现C形、S形及圆周轨迹运动。
研究指出,未来需通过优化关节刚度分布以抵消自重影响,并进一步推进VCM机构小型化,为航空航天、核电等高精尖领域的复杂环境作业提供更优技术方案。该研究为连续体机器人的结构创新与精准控制提供了重要理论支撑,推动柔性机器人技术向更高精度、更广泛应用场景发展。
关键词
运动虚拟中心机构;连续体机器人;柔性关节;伪刚体模型;绳驱动
引用
Guoxin LI(李国鑫), Jingjun YU(于靖军), Yichao TANG(唐一超), Jie PAN(潘杰), Shengge CAO(曹晟阁), Xu PEI(裴旭). Design and modeling of continuum robot based on virtual-center of motion mechanism. Front. Mech. Eng., 2023, 18 (2): 23
https://doi.org/10.1007/s11465-022-0739-6

扫描二维码阅读原文
精彩推荐
1.FME文章荐读 | 围绕远程点灵巧运动的最新进展:机器人领域远程运动中心技术综述
2.FME文章速览 | 不同冷却条件下铣削超高强度钢时刀具与工件界面摩擦学行为研究
3.FME文章荐读 | 超声振动辅助磨削连续纤维增强金属基复合材料的去除机理研究:实验与仿真模型
4.FME文章荐读|基于机器学习的机构运动学分析与综合方法综述
5.FME文章荐读 | 基于折纸模型的抛物柱面网状天线单层桁架结构设计方法与驱动配置优化
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






