|
|
|
|
|
多功能胶囊型穿刺活检机器人助力胃肠系统精准诊断 | MDPI Micromachines |
|
|
论文标题:A Multifunctional Capsule-like Puncture Biopsy Robot for the Gastrointestinal System
论文链接:https://www.mdpi.com/2072-666X/16/5/589
期刊名:Micromachines
期刊主页:https://www.mdpi.com/journal/micromachines
文章导读
胃癌是全球最常见的癌症之一,其中胃肠道癌症占全球癌症发病率的四分之一,并导致三分之一的癌症相关死亡。尽管近年来的发病率和死亡率都有呈下降趋势,但据全球恶性肿瘤统计报告(GLOBOCAN 2022)显示,胃癌仍然是全球第五大常见确诊癌症,并位列癌症相关死亡的第五大原因。胃肠道上皮下肿瘤(Gastrointestinal submucosal tumors, SMTs)因其位于皮下深层组织,常常难以通过传统方法实现准确诊断。
为突破现有活检胶囊机器人取样深度有限的问题,本文提出了一种集穿刺、止血和靶向给药功能于一体的多功能类胶囊形态穿刺活检机器人(Puncture biopsy robot, PBR)。该机器人采用远端微型电永磁协同驱动结构,可在无外部磁控平台的条件下精确控制针头进出,实现对胃部不同表面形态病变组织的取样操作。同时,机器人集成石墨烯-碳纳米管复合加热膜,可快速升温实现热止血,并借助分段相变材料的熔融触发机制实现多级控释药物的精准给药。本研究为微创化、智能化的胃肠道肿瘤活检与治疗一体化系统提供了新型技术路径。
关键点
组织活检是现代医学中一项重要的诊断技术,广泛应用于获取组织样本以进行病理学分析。近年来提出的多种微型活检机器人设计方案,通常只能取浅表活检样本,难以对胃肠道深部肿块实施有效取样。此外,现有的电磁驱动活检机器人仍由外部磁场作为主要驱动执行器的结构组成,这显著增加了系统的复杂性和能量消耗。为突破上述限制,本研究旨在开发一种基于远端电永磁协同驱动的多功能类胶囊形态穿刺活检机器人(PBR),其可以在人体内——尤其是针对胃部粘膜下肿瘤——实现穿刺、给药、热止血的功能,如图1所示。通过末端装置,利用微型线圈通入瞬态电流产生的冲激磁场控制针头进出,使得穿刺过程摆脱了外部控制平台的工作空间限制,可以在任意位置对可疑病变组织进行提取。同时,与针头连接的末端长方体状永磁体也使PBR在外部磁场响应下,实现机器人的驱动和定位。通过快速连续通电,可以让机器人实现连续进针,最终获取有效活检组织,待转移至体外进行病理学检测。在止血机制上,通过石墨烯-碳纳米管复合电加热薄膜实现精准温控,利用蛋白质热凝固效应封闭创口,与传统机械止血方案相比显著降低了出血量。同时,我们基于止血加热层进一步拓展了给药功能,通过分段式相变材料结合热触发释放机制,实现不同药物的阶段控制释放,从而达到高浓度靶向给药的目的。
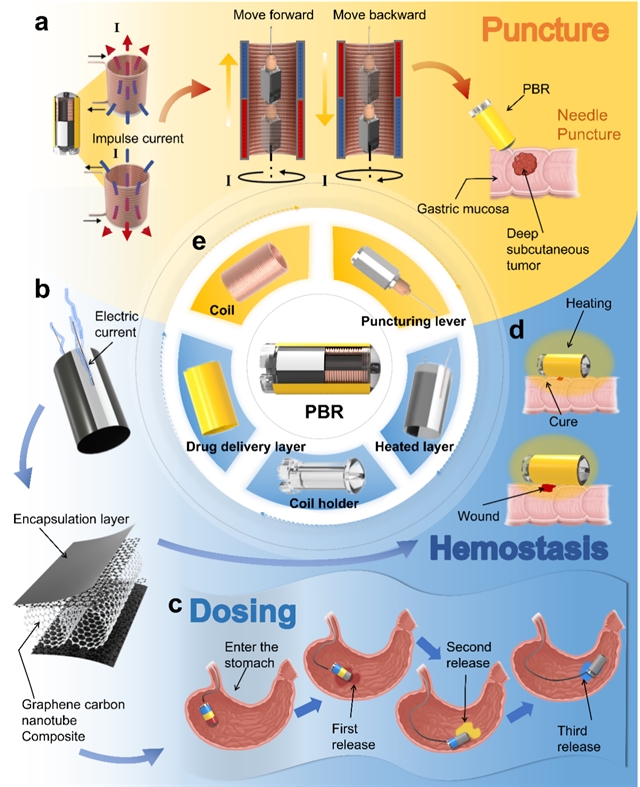
图1.PBR的结构组成、应用原理以及可实现功能。(a)PBR的穿刺结构、原理及穿刺场景演示(b)PBR发热层发热原理;(c)PBR的三段式多点给药过程;(d)PBR热止血功能演示;(e)PBR的结构组成。
穿刺评估
本研究提出的穿刺活检机器人(PBR)采用微型线圈与永磁体之间的电磁耦合驱动,无需复杂的机械结构,即可实现针头的前进与回缩。在穿刺评估实验中,在不同电流条件下针头均可稳定伸出,最大伸出长度可达8 mm,标准差约2.6 mm,表明系统具有良好的稳定性和可重复性。进一步分析显示,当针头暴露至3–5 mm区间时,磁场分布达到最优,进针净距离最大;通过反向通电则可顺利实现针头缩回,从而确保取样与回收过程的完整性。综合效率与安全性考虑,3A电流被确定为最优操作参数。更重要的是,在猪胃的组织表面的四种典型形态(突起、斜面、平面和凹陷)的穿刺测试中,该机器人的针头均能顺利刺入并获取组织,充分展现出在复杂环境中的良好的适应性与可靠性,本研究为临床微创活检提供了安全、精准的解决方案。
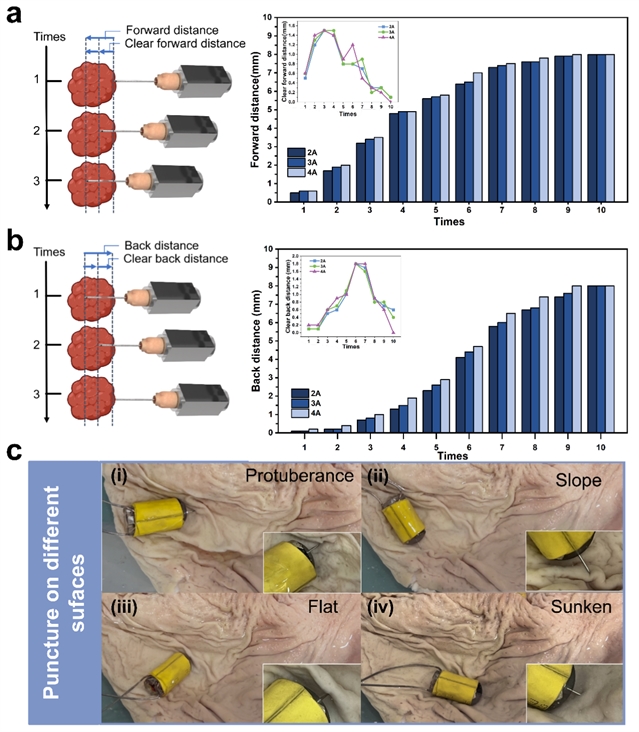
图2.PBR穿刺距离评估及猪胃内针对不同形态肿瘤表面穿刺。(a)进针示意:穿刺总距离与净距离;(b)退针示意:回退总距离与净距离;(c)PBR在猪胃内针对不同形态肿瘤表面穿刺:(i)突起面(ii)斜面(iii)平面(iv)凹陷面。
热止血评估
在穿刺活检完成后,我们为机器人设计了创新性的柔性电热止血模块。该模块以碳纳米管-石墨烯复合膜作为核心发热元件,凭借其三维导热网络与低电压驱动特性,实现快速升温与精准控温。实验结果表明,在恒定电压驱动下,该复合膜可在13秒内由室温迅速升至目标温度,且稳态温度随电压呈线性提升,满足热止血需求。更为重要的是,热成像数据显示,该加热区域最高温度点与边缘点的温差始终控制在±1℃以内,其性能显著优于传统金属发热体,有效避免了因局部过热导致的组织损伤。在6.6V的临界电压下,该模块能够将伤口接触温度稳定保持在70℃,精准达到蛋白质凝固所需阈值,实现安全、快速且均匀的热止血效果,为微创手术提供可靠保障。
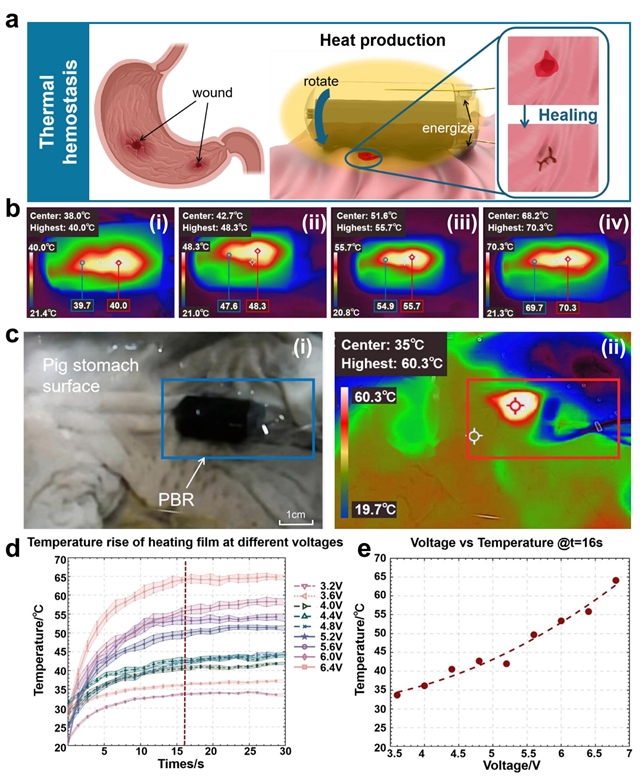
图3.发热层发热功能评估:(a)热止血功能模块应用示意图; (b)从(i)到(iv)依次为恒压源为3.6V,4.6V,5.6V,6.6V时热止血模块稳定后温度;(c)热止血功能升温验证实际加热过程图;(d)热止血功能升温验证的热成像仪图;(e)不同电压下的加热情况;(f)当加热160s时温度与电压的关系。
释药评估
在实现热止血功能的基础上,我们进一步拓展了机器人的应用边界,创新性地在其表面集成了基于相变石蜡的多级药物控释系统。该系统利用三层不同熔点(35℃、42℃、50℃)的石蜡涂层实现分级释放:当电压逐级提升时,热止血模块均匀的温场可依次触发石蜡层相变,从而分别释放红、黄、蓝三种模拟药物。在猪胃内环境中进行的实验结果显示,药物可在5分钟内覆盖针孔周围4 mm范围,且各层药物之间分层隔离良好,避免了药物混杂。通过这种温度—空间三重控制策略,该机器人不仅能完成精准穿刺与快速止血,还能实现按需、多次、分区域的药物释放,为微创治疗提供了一体化、智能化的新路径。
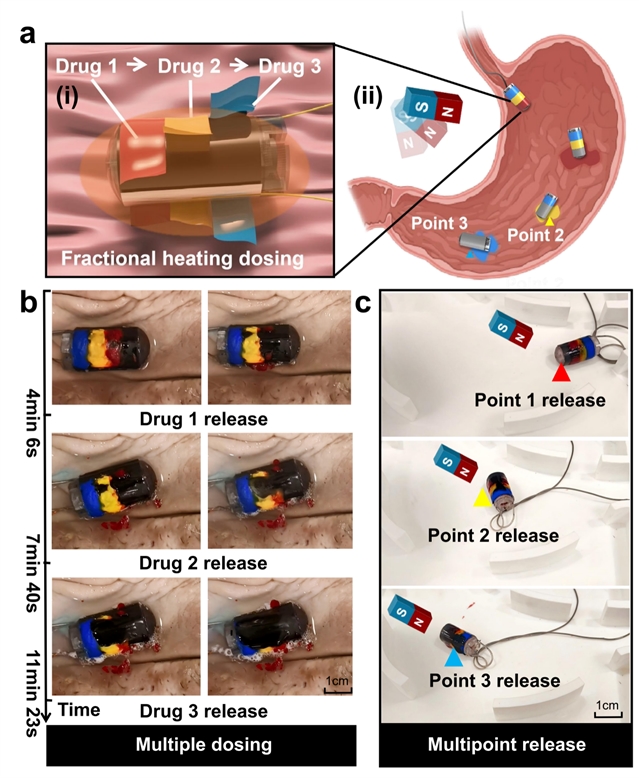
图4.PBR三段式多点给药功能:(a)机器人的给药模块示意图;(b)猪胃中给药的生物实验;(c)运动过程中给药。
结论与展望
1.本研究创新性地设计了一种多功能类胶囊穿刺活检机器人(PBR),集成电磁驱动精准穿刺、热止血与控释给药三大功能,实现对胃肠道病变组织的诊断与治疗一体化操作。
2.实验结果表明,该系统在穿刺精度、不同表面形态下的环境适应性与热控安全性方面表现优异,组织采样稳定可靠。
3.PBR为胃肠道肿瘤早期诊断与精准治疗提供了一种全新的微创化解决方案,展现出良好的临床应用前景。
原文信息

Xu, X.; Gao, J.; Tong, D.; Zhao, Y.; Fan, X.; Ge, W. A Multifunctional Capsule-like Puncture Biopsy Robot for the Gastrointestinal System. Micromachines 2025, 16, 589.
Micromachines 期刊介绍
主编:Ai-Qun Liu, The Hong Kong Polytechnic University, Hong Kong, China
期刊研究内容涉及微/纳米结构、材料、器件、系统及与微纳技术相关的基础研究和应用。
|
2024 Impact Factor
|
3.0
|
|
2024 CiteScore
|
6.0
|
|
Time to First Decision
|
17.2 Days
|
|
Acceptance to Publication
|
1.9 Days
|

扫描二维码,
订阅期刊最新资讯。
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






