|
|
|
|
|
柔软、灵活又耐用的机器手——多种Diels-Alder聚合物构建的新型软气动执行器 | MDPI Actuators |
|
|
论文标题:Self-Healing and High Interfacial Strength in Multi-Material Soft Pneumatic Robots via Reversible Diels–Alder Bonds
期刊:Actuators
作者:Seppe Terryn, Ellen Roels, Joost Brancart, Guy Van Assche and Bram Vanderborght
发表时间:30 April 2020
DOI:10.3390/act9020034
微信链接:
https://mp.weixin.qq.com/s?__biz=MzI1MzEzNjgxMQ==&mid=2650012515&idx=3&sn=
f79740166fc310a99d151771716af3aa&chksm=f1de41a7c6a9c8b1a5f8712c053e33a3b
78605f8a95be033a2ab6f78f87782c07f415ae222fb&token=233953432&lang=zh_CN#rd
期刊链接:https://www.mdpi.com/journal/actuators
软体机器人是一种新型机器人,它部分 (或全部) 由如硅树脂或聚氨酯等柔性材料构成。软体机器人由气动驱动,利用气体的可压缩性制成,使得这些机器人兼顾了安全性和能源效率。由于软体机器人具有适应性和安全性的特点,所以它们常被部署在必须执行精密任务的应用中,包括微创手术、主动假肢和涉及操纵形状不规则的精密物体的自动化任务等。由单一高柔性材料组成的软机器人被称为连续型软机器人,其强制输出非常有限。然而,在多材料柔性机器人部件中,不同柔性材料之间的连接以及柔性材料与非柔性材料之间的连接普遍较弱。随着时间的推移或当被大量地负载时,这些界面的元件将逐渐失效,材料界面会发生泄漏,使得执行器效率和性能下降,最终导致元件在较短的使用寿命内失效。在本篇研究中,作者提出用多种Diels Alder (DA) 聚合物构建新型多材料软气动执行器来解决这一问题。

材料方法
DA聚合物网络的合成分两步进行。首先,缩水甘油糠醚 (FGE) 通过环氧胺反应不可逆地与Jeffamine (JT5000) 结合,生成呋喃功能化Jeffamine (FT5000)。将FGE和JT5000按化学计量环氧胺比例混合,一组在60℃下放置5天,另一组在90℃下放置2天,完成两组分之间的不可逆反应。接下来,呋喃功能化的Jeffamine上的呋喃基与双马来酰亚胺上的马来酰亚胺基通过溶剂浇铸形成DA交联,形成热可逆网络 (DPBM-FT5000)。Diels Alder网络的材料性能可以根据使用这些材料的应用需求,通过改变网络设计参数 (参数为试剂的摩尔质量,试剂的官能团和反应组分之间的比例,文中是马来酰亚胺和呋喃) 来实现转变。
实验结果与讨论
图1对两种DA聚合物网络的材料 (DPBM-FT5000-r1 (r1)、DPBM-FT5000-r4/6 (r4/6) ) 样品在不同温度下进行拉伸试验,结果表明,当两种DA聚合物结合并加热到低于最低的Tgel温度时,界面键比机械性能最弱的纯材料的整体强度更强。这种合并过程受到了Tgel的限制,因为在较高的温度下,交联较少的材料将失去其结构完整性并开始流动。
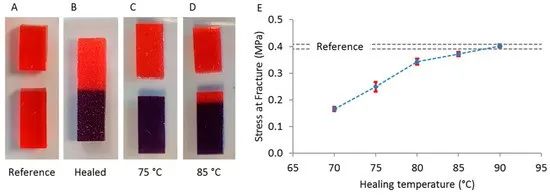
图1. (a) 用作参考的单材料r4/6拉伸试样。(b) (r1)(紫色)-(r4/6) (红色) 样品,合并热-冷循环最高温度为70°C、75°C、80°C、 85°C或90°C。(c) 70-80°C合并的拉伸试样在多材料界面处断裂。(d) 在85-90°C合并的拉伸试样不会在多材料界面断裂。(e) 测量的断裂应力作为合并温度的函数。对长度为7.79±0.37 (a widt) 的试样进行拉伸试验,直至在25°C下以1%s−1的应变斜坡断裂。
为了验证合并原理和可修复性,作者基于PneuNets设计开发了一种多材料自修复软气动执行器。该执行器的气室采用软DA网络DPBM-FT5000-r4/6,而底层采用柔性较弱的DA网络DPBM-FT5000-r1。因此,对气室加压所引起的外加应力增强了执行器的各向异性变形响应。多材料软弯曲气动执行器 (BSPA) 的制造依赖于折叠和共价结合技术。该技术可用于从DA表面构建多材料三维多边形结构,如图2中所示的生成多材料BSPA所需的步骤。

图2. 由DPBM-FT5000-r4/6 (红色) 和r1 (紫色) 构成的多材料自愈合弯曲软气动执行器的制造工艺。
为了说明这些机械性能足以应用于软机器人,作者将四个BSPA放置在3D打印PLA部件中,形成一个软气动夹爪 (图3)。使用r4/6 (红色) 的DA网络非常灵活,在低至20kpa的压力下可以实现高变形。然而,由于这种高灵活性,只有相对较轻的物体(鸡蛋= 60克)才能被捡起。最大重量取决于物体的形状和表面的粗糙度。它可以通过使用具有不同网络设计参数的更硬的DA网络来降低手指的灵活性,或者通过增加BSPA薄膜厚度来实现。当将五个可愈合的BSPA放置在3D打印的PLA手掌上时,一个柔软的气动手就形成了。使用压力控制系统时,所有的手指都可以被单独驱动,并执行非常简单的手势,这项技术可应用在社交机器人上。

图3. 四个BSPA可以同时在一个软抓手上工作,通过空气室的加压和减压,可以采摘和放置不同的物体。
通过多个损伤-愈合周期,作者测试了BSPA的愈合能力。在测试过程中,手术刀和针在膜上造成的宏观损伤都愈合了 (图4:损伤D1-D4)。此测试证明了剧烈的损伤是可以愈合的。为了测试执行器的力学性能恢复情况,在每个损伤愈合周期后作者重新测量了其弯曲特性,并与损伤前的初始特性进行比较。发现在每次循环后,这些BSPA扔可覆盖高达90°的弯曲范围,且不会形成泄漏。在每个损伤愈合周期后,作者也测量出一个非常相似的弯曲特性,这说明愈合后恢复良好。这些执行器在完全愈合后就像新的一样,可以完全恢复它们的任务,并具有最初始的性能。

图4. 通过尖锐物体引起宏观损伤的愈合来测试改进后的BSPA的愈合能力,如手术刀刀片 (损伤D1、D2、D4、D5) 和针 (D3)。> 10 mm相对较大的切口通过使用温和的加热 (90°C) 法完全愈合后,驱动器再次完全密封,剩下的是一个由错位引起的非常浅的疤痕。
实验结论
Diels Alder (DA) 弹性体可以解决柔性材料之间的连接性弱的问题。通过将四种驱动器放在一起形成软夹持器,说明了多材料驱动器的适用性。五个多材料的软气动执行器被用来形成一个柔软的手,这证明了这些DA网络在社交机器人应用中的适用性。被轻度破坏 (如切割和穿孔),甚至严重破坏 (如将致动器切成两块) 的BSPAs,可以完全愈合,并能恢复初始执行器性能。这种愈合能力有可能可以进一步增加多材料软机器人组件的寿命。此外,DA聚合物是完全可回收的,在单一软组件中结合多种柔性材料的能力大大增加了未来软机器人的设计自由度。在不久的将来,我们便可以制造新的软机器人部件,其中两种以上的DA网络类型可以组合,生成具有有趣的变形模式和内在愈合能力的健壮部件。
Actuators期刊介绍
主编:Kenji Uchino, University Park, USA
Actuators下设包括执行器材料、航空执行器、机器人执行器、控制系统等10个专栏,为执行器和控制系统的科学和技术提供了一个先进的论坛。
2020 Impact Factor:1.994
2020 CiteScore:3.0
Median Publication Time:39

特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






