|
|
|
|
|
迷你机器人帮助降低结肠镜检查者的痛苦|Scientific Reports |
|
|
论文标题:A Soft Pneumatic Inchworm Double balloon (SPID) for colonoscopy
期刊:Scientific Reports
作者:Luigi Manfredi,Elisabetta Capoccia,Gastone Ciuti,Alfred Cuschieri
发表时间:2019/07/31
数字识别码:10.1038/s41598-019-47320-3
结直肠癌(CRC, Colorectal cancer)是全球第三大最常见的癌症病因。定期筛查无症状人群可显著降低死亡率(早期、一期、诊断阶段的5年生存率超过90%)。CRC筛查涉及多个步骤,不过最好的方式仍然是光学结肠镜检查,因为Polymers它在检测小的或无蒂息肉和低假阴性率方面具有很高的敏感性。
传统的结肠镜检查需要一名训练有素的医师,利用一根1.6米长的结肠镜来进行。在检查的过程中,肠镜需要手动推入,过程中会挤压到肠壁,为患者带来不适。而利用迷你机器人来进行结肠镜检查则有不少优点,一旦从肛门进入后,装置将通过固有的运动能力移动到盲肠,几乎消除了疼痛和不适,因为它避免了结肠壁上的压力。而设计智能的结肠镜机器人具有一定的挑战性,因为可用的空间有限,肠道内部表面光滑,而且结肠的内部是曲折的三维形状。机器人施加的运动力可能会损伤结肠壁,并给患者带来疼痛和不适。
近期,在发表于Scientific Reports上的A Soft Pneumatic Inchworm Double balloon (SPID) for colonoscopy研究中,来自英国邓迪大学的Luigi Manfredi及同事报道了一种软式气动爬行双球囊(SPID)小型结肠镜机器人,两个球囊由具有3度自由度的软式气动致动器连接而成。SPID外径18mm,总长度60mm,重10g。球囊提供了在结肠壁上的锚固,以进行仿生尺蠖运动。该设计减少了结肠壁的压力,从而减轻了检查过程中的疼痛和不适。作者利用微型机器人在一个形状和尺寸与人体相似的可变形塑料结肠模型中进行了测试,通过变形和协调弯曲的能力,它展示了高效的运动能力。该微型机器人由弹性体制成,由3D打印组件构成,因此对于一次性设备来说,生产成本是比较低的。
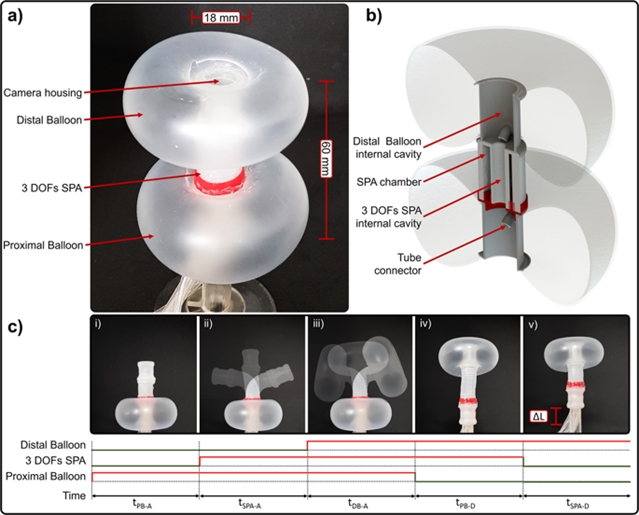
图1:SPID设计示意图
摘要:The design of a smart robot for colonoscopy is challenging because of the limited available space, slippery internal surfaces, and tortuous 3D shape of the human colon. Locomotion forces applied by an endoscopic robot may damage the colonic wall and/or cause pain and discomfort to patients. This study reports a Soft Pneumatic Inchworm Double balloon (SPID) mini-robot for colonoscopy consisting of two balloons connected by a 3 degrees of freedom soft pneumatic actuator. SPID has an external diameter of 18 mm, a total length of 60 mm, and weighs 10 g. The balloons provide anchorage into the colonic wall for a bio-inspired inchworm locomotion. The proposed design reduces the pressure applied to the colonic wall and consequently pain and discomfort during the procedure. The mini-robot has been tested in a deformable plastic colon phantom of similar shape and dimensions to the human anatomy, exhibiting efficient locomotion by its ability to deform and negotiate flexures and bends. The mini-robot is made of elastomer and constructed from 3D printed components, hence with low production costs essential for a disposable device.
(来源:科学网)
特别声明:本文转载仅仅是出于传播信息的需要,并不意味着代表本网站观点或证实其内容的真实性;如其他媒体、网站或个人从本网站转载使用,须保留本网站注明的“来源”,并自负版权等法律责任;作者如果不希望被转载或者联系转载稿费等事宜,请与我们接洽。






