有这样一双“手套”,戴上它,穿戴者秒变大力士,双手可以翻起200多公斤的石板,双手“吊单杠”时间翻倍,手提重物行走疲劳感大大减轻……
这款黑科技机械手套正是中国科学技术大学特任教授孙帅帅课题组与合作者,联合研发的一种基于磁流变技术的手部外骨骼系统,能够极大增强人体手部抓握耐力与抓握力,有望应用在地震救援、物流搬运、工业生产等场景。
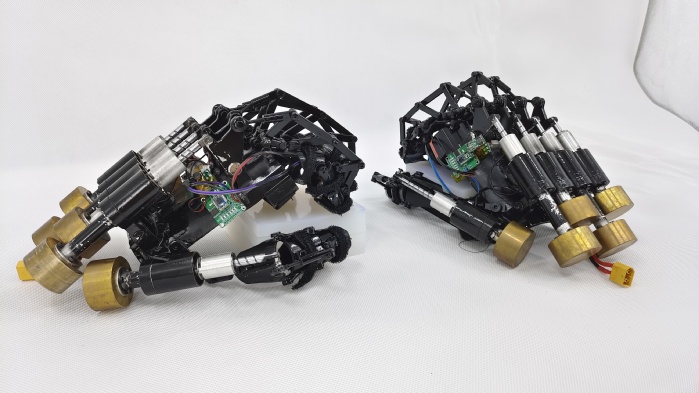 基于磁流变技术的手部外骨骼系统。中国科大供图
基于磁流变技术的手部外骨骼系统。中国科大供图
?
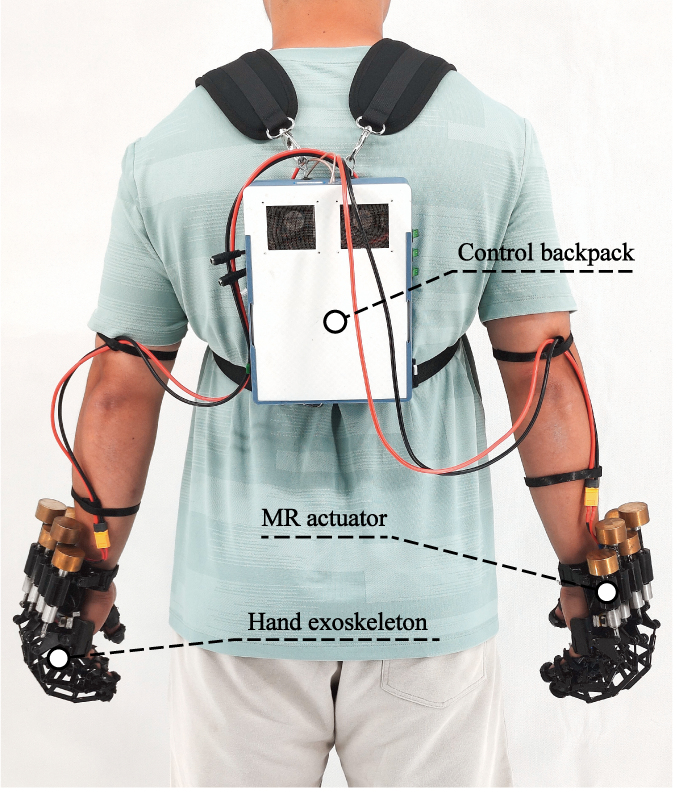 磁流变手部外骨骼系统穿戴图。中国科大供图
磁流变手部外骨骼系统穿戴图。中国科大供图
?
用小功耗获得大力量
灵活的双手在人类发展中起到至关重要的作用。然而,在救援、搬运等应用场景中,双手不仅要足够灵活,还需要足够力量,以支撑长时间、高负载的工作。
近几十年来,随着机器人技术、材料科学等领域的发展,研究人员有望能够研发像“钢铁侠”机甲一样的可穿戴外骨骼,利用机械结构及致动器共同作用给予人手助力,从而增强人手功能表现,大幅提升人类极限,其中手部外骨骼是研究热点之一。
“实际上,目前学术界与企业界已出现多种手部外骨骼,主要是用于辅助中风、偏瘫患者康复的。它们往往是基于电机、液压致动,又或是采用气动技术。”孙帅帅介绍,这些致动器普遍存在着输出力小、体积大和重量大等问题,难以解决大幅增强手部抓握耐力和抓握力的难题。
因此,面对大负载场景,手部外骨骼的难点是研发一种体积小、轻量便携,但又输出力大、背驱能力好的致动器。
孙帅帅团队利用磁流变智能材料模量可调的特性,创新地设计了基于磁流变轴承和滚珠丝杆结构的被动致动器,用在仅需5瓦功耗下实现了最高1046牛的大输出力,力-功率比相较其他方案提升一个数量级,在同样输出力下节省了97.7%的能量消耗。
“也就是说,我们用很小的功耗得到了很大的力。”孙帅帅解释道,这意味着磁流变手部外骨骼的续航时间相较于普通外骨骼系统能够大幅提升。
磁流变智能材料“显神通”
在中国科大人形机器人研究院实验室,记者见到了这款黑科技。别看它体积小,背后也是一个系统工程。
论文第一作者、中国科大博士生麦贤龙介绍,“这款手部外骨骼系统主要分为外骨骼、磁流变致动器、指尖力传感器和控制背包几个部分。它的工作原理是将外界的负载转移至外骨骼,通过调节磁流变致动器的输出力,做到在大负载时外骨骼具有大承载能力,即变‘硬’,而在不需要助力时,手套会变‘软’,几乎不会影响手指的灵活运动。同时,我们发现这种结构还可以通过飞轮储能,在不需要任何外部动力源的情况下,增强穿戴者的瞬时抓握力。”
这款手套“软硬”可控的奥秘在于磁流变致动器中使用的磁流变智能材料。
“磁流变是一种独特的智能材料,其性能在磁场的作用下会发生显著变化。在没有磁场的情况下,这种材料像脂一样具有较好的流动性;当加了磁场后,材料就会变成半固体。”孙帅帅一边展示一边向记者解释,正是基于这种特性,将其应用在手部外骨骼系统上,可实现手套的“软硬”可控。
为了验证手套性能,研究团队首先进行了长时间提拉重物的实验。通过测量穿戴与不穿戴手套受试者前臂的肌电信号,团队发现前者的表面肌电信号显著降低,表明肌肉收缩力减弱,疲劳程度减轻。此外,团队还进行了“吊单杠”实验,测试结果显示穿戴手套的参与者坚持时间增加了一倍。
在握力增强实验中,受试者分别使用和不使用手套进行快速抓握。结果显示穿戴手套时,平均握力增加85.8牛,比不使用高出41.8%。
此外,研究团队注意到在地震救援中,现场环境复杂,很多设备难以进场,多依靠救援人员徒手清理重物,因此他们还进行了地震救援模拟应用实验。
在营救被压人员和运送伤员的任务中,受试者指屈肌的肌电信号幅度均大幅减小,这意味着控制手指抓握的肌肉活动度大幅降低。在运送伤员任务中,受试者呼吸率相较无外骨骼情况平均降低了20%,最大运送距离提升了110%。
除了以上常见的应用场景,孙帅帅还介绍了一种令人兴奋的场景——主端从端的遥操作。
“我们可以利用磁流变材料的阻尼特性,设计能够提供力反馈的手部外骨骼和手臂外骨骼,同时结合关节运动捕捉,可以实现远程机械臂、机械手的遥操作,并同时提供真实的力反馈,以进行深空探测作业。”孙帅帅说。
研发更智能与舒适的新一代手套
“接下来,我们将进一步提升手部外骨骼系统功能。比如,加入人体意图识别的功能,更精准地根据穿戴者意图调整外骨骼的输出。同时,我们希望改进外骨骼的结构,利用复合材料和3D打印技术在减轻重量的同时增加结构强度。此外,还希望改进人机交互设计,使外骨骼满足人手运动的大部分自由度,减少与人手之间的滑移与不舒适感。”孙帅帅表示。
据了解,《IEEE机器人学汇刊》为机器人学领域公认的国际顶级期刊之一,要求论文在理论及工程实践上均能为机器人学发展做出重要贡献,其每年全球发文量约200篇,接收率极低,刊发的相关成果代表了机器人领域先进的重大进展。
相关论文信息:https://ieeexplore.ieee.org/document/11080110
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






