近日,广州海洋地质调查局首次利用小型科考船搭载6000米级自主水下机器人(AUV),成功实现快速部署及工程化应用,单航次完成8个潜次700余千米高精度近海底测绘,作业成本大幅降低,无人智能化装备能力建设再上台阶。
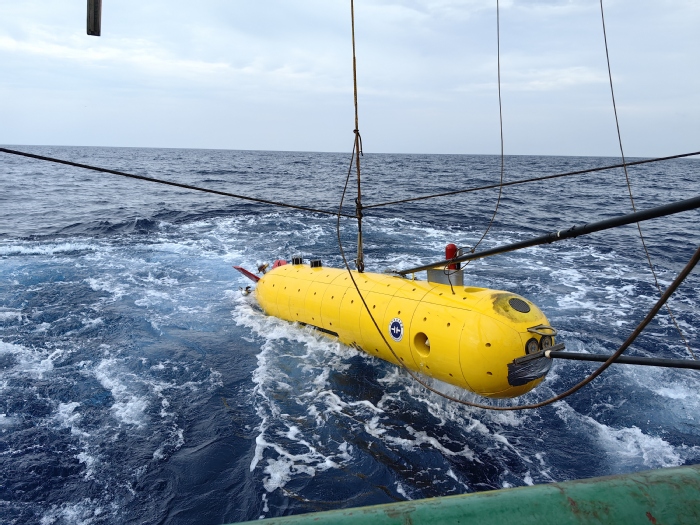 技术人员正在回收AUV。广州海洋地质调查局供图
技术人员正在回收AUV。广州海洋地质调查局供图
?
航次中,技术人员优化GNSS全球导航定位系统、USBL超短基线、INS惯性导航与DVL多普勒测速仪、时钟单元等多源数据融合算法,建立基于卡尔曼滤波的动态补偿模型,攻克深海近海底动态定位补偿难题,有效提升水下潜器定位精度。同时,跨学科融合无人潜器平台稳定性控制、声学数据采集、多源数据处理等技术,实现海底地形地貌数据三维拼接融合,与传统船载设备获取的深海近海底数据相比,测绘精度、效率和稳定性大幅提升。
记者获悉,本次应用通过定制化适配改装,构建可移动水下通讯与定位系统,完善全流程作业技术,在小型科考船实现6000米级AUV从吊装布放、水下定位通讯、数据采集、回收至数据传输的快速部署,为深海资源勘探开辟了轻量化作业新范式。
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






