近日,华东理工大学教授金晶领衔的脑机接口及控制团队提出了一种基于虚实融合控制框架的思维增强脑机接口系统——面向四足控制的混合现实增强脑机接口系统,实现了对四足机器人的高效、稳定控制,并能够适应多种复杂场景。
金晶介绍,传统的基于稳态视觉诱发电位的脑机接口系统容易受环境光干扰,便携性也差。为克服光干扰,研究团队引入混合现实技术,将视觉刺激直接嵌入到用户的现实视野中,有效克服了环境光干扰的影响,同时显著提高了信号的识别准确率。
 金晶团队研究生正在测试最新成果
金晶团队研究生正在测试最新成果
该系统将任务分为近场和远场两类,并分别通过增强现实和混合现实技术进行处理。对于近场任务,系统主要依赖增强现实技术。系统能够在用户的视野中实时叠加机器人的运动状态、周围环境信息以及操作引导提示,从而提升控制的响应速度与操作精度;对于远场任务,系统则通过混合现实接口进行管理。系统能够为用户提供全局环境信息与任务规划支持,不仅提高了控制的稳定性,还显著降低了用户的认知负担。
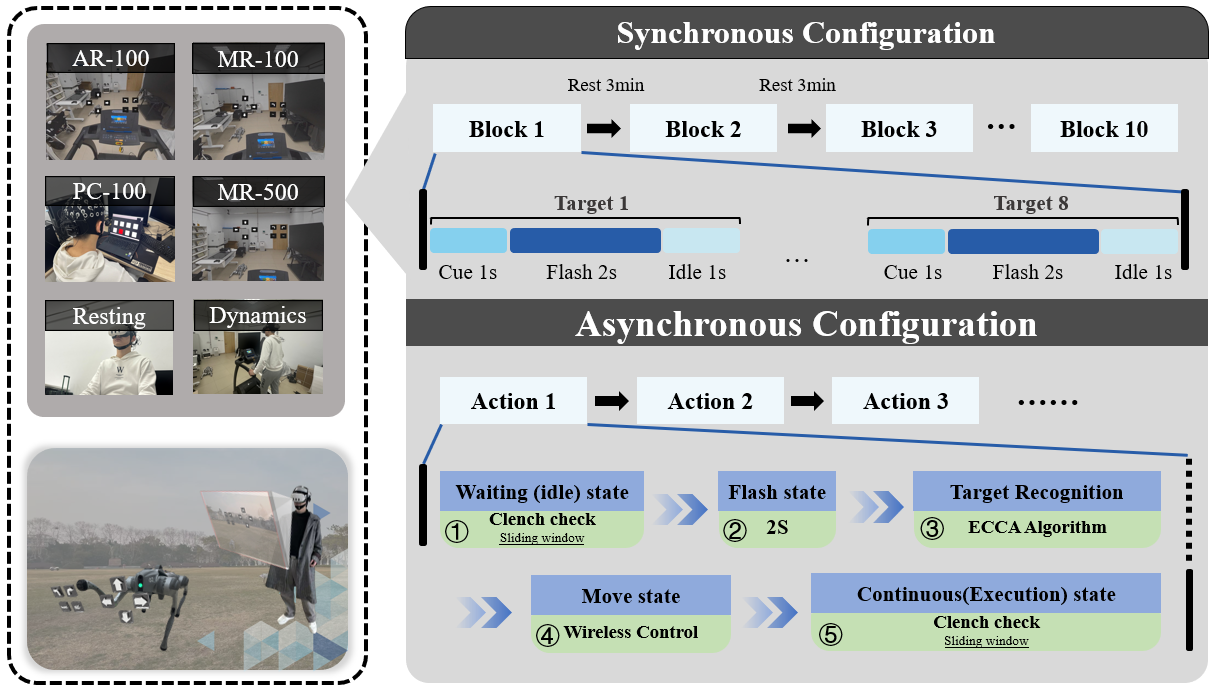 系统相关介绍。以上图片均由研究团队提供
系统相关介绍。以上图片均由研究团队提供
此外,新系统集成了先进的信号处理算法和机器学习模型,为用户提供更加精准和流畅的控制体验。
通过模块化设计和灵活的算法配置,新系统同时具备强大的场景适应能力,可以快速适应不同场景的需求,将显著提升四足机器人的应用潜力。
新系统还将推动混合现实技术在智能交互领域的应用,通过混合现实技术与脑机接口的结合,为智能家居、智能驾驶等领域的发展提供了重要参考。
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。






