蜈蚣以弯弯曲曲的步态而闻名。它们有几十到几百条腿,可以不停穿越任何地形。
美国佐治亚理工学院一个由物理学家、工程师和数学家组成的团队很想知道,在这个世界上,多肢体是否有助于运动,并利用这种运动方式发挥自己的优势。研究人员开发了一种新的多足运动理论,并创建了多足机器人模型。
?
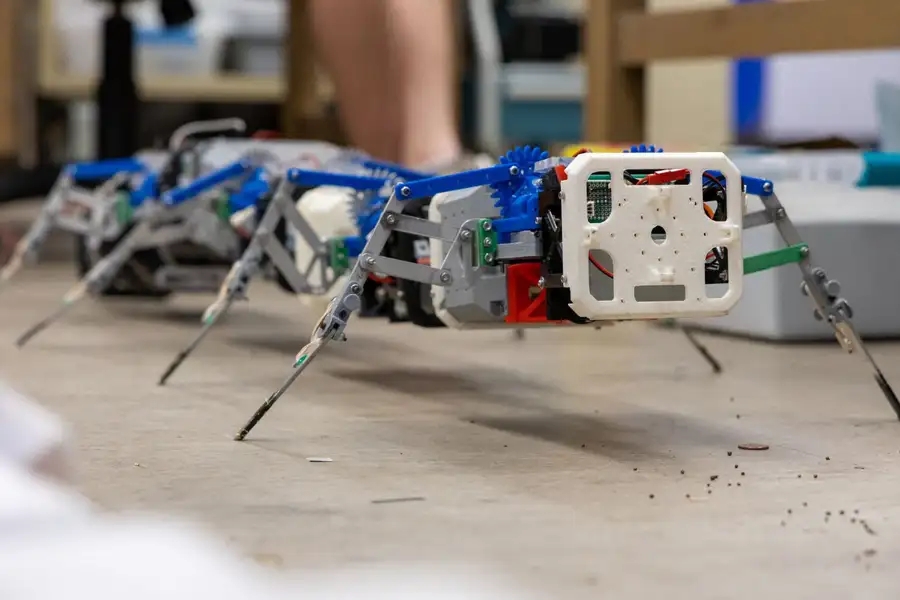
更多腿意味着在崎岖的地形上更稳定。图片来源:佐治亚理工学院
多足机器人可以在不平坦的表面上移动,而无需像理论预测的那样使用额外的传感或控制技术。这些机器人有望应用于农业、太空探索,甚至搜救。相关论文5日4日发表于《科学》。
“我们受到克劳德·香农通信理论的启发,想看看如果我们在机器人上安装更多的腿——4条、6条、8条甚至16条腿,会发生什么。”论文作者、佐治亚理工学院博士后Baxi Chong说。
该团队开发了一种理论,认为给机器人增加一对腿可以提高其在具有挑战性的表面上稳健移动的能力。这称为空间冗余。这种冗余能使机器人的腿独立运行,而不需要传感器“解读”环境。如果有一条腿不稳,那么充足的其他腿会让它继续运动。
“两足机器人通常需要许多传感器进行实时控制。但在搜救、火星探索等应用场景中,所需的传感器受到一定限制。”Chong说。
研究人员模拟各种自然环境、每次增加两条腿来测试机器人。正如理论预测的那样,随着腿数的增加,即使没有传感器,机器人也可以很灵活地在不同地形上移动。在户外真实地形上测试时,他们发现机器人能在各种环境中穿行。
研究人员已将这一技术应用于农业。合作公司希望这些机器人为对除草剂无效的农田除草。
该团队还想改进这个机器人,确定最佳腿数。“我们需要更好地了解在如此复杂的系统中,能量、速度、功率和鲁棒性之间的权衡。”Chong表示。
相关论文信息:https://doi.org/10.1126/science.ade4985
版权声明:凡本网注明“来源:中国科学报、科学网、科学新闻杂志”的所有作品,网站转载,请在正文上方注明来源和作者,且不得对内容作实质性改动;微信公众号、头条号等新媒体平台,转载请联系授权。邮箱:shouquan@stimes.cn。