美国麻省理工学院联合国际研究团队开发出一种人工肌肉纤维,在诸多特性上更接近天然肌肉。与成束构成生物肌肉的纤维一样,这些纤维可以按不同构型排列,以满足特定任务的需求。与传统机器人驱动系统不同,它们具有足够的柔顺性,能与人体舒适地交互,并且无需马达、外部泵或其他笨重的辅助硬件即可静音运行。近日,相关研究成果发表在《科学—机器人》上。
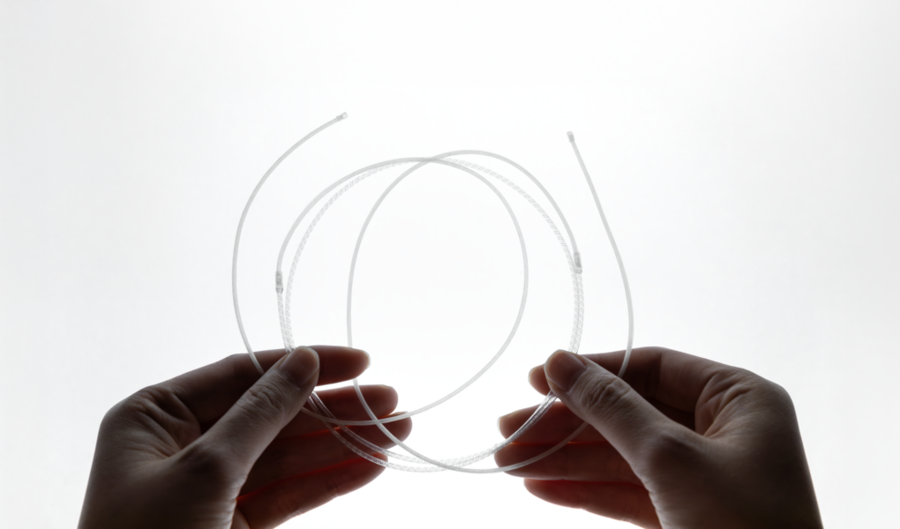
电液纤维模仿天然肌肉纤维的成束方式,有望实现紧凑、安静的机器人和假肢系统。图源:MIT
论文第一作者、麻省理工学院博士生Ozgun Kilic Afsar解释说,这项新系统融合了两种技术:一种是称为“薄型麦基本驱动器”的流体驱动人工肌肉,另一种是基于电流体动力学的小型化固态泵,这种泵能在密封的流体腔室内产生压力,且无需运动部件或外部流体供应。
Afsar指出,迄今为止,大多数流体驱动软体驱动器都依赖外部的“笨重、庞大、往往噪音很大的液压基础设施”,这使得它们很难集成到对移动性或紧凑轻量化设计至关重要的系统中。这已成为流体驱动器在实际应用中面临的根本性瓶颈。
突破这一瓶颈的关键在于使用基于电流体动力学原理的集成泵。这些毫米级、电驱动的泵通过向介电流体中注入电荷来产生压力和流量,从而生成离子并带动流体运动。每个泵仅重几克,厚度不比牙签粗多少,可以连续制造并轻松缩放。Afsar说:“我们将这些纤维泵与薄型麦基本驱动器集成到一个封闭的流体回路中。”她指出,考虑到两个组件的动态特性不同,这并非易事。
一个关键的设计策略是将这些纤维以特殊结构配对。论文通讯作者、意大利巴里理工大学教授Vito Cacucciolo解释说,这意味着“一块肌肉收缩而另一块伸长”,就像当你弯曲手臂时,肱二头肌收缩而肱三头肌拉伸。在他们的系统中,一个毫米级的纤维泵位于两个尺寸相近的麦基本驱动器之间,将流体驱动至一个驱动器使其收缩,同时使另一个驱动器松弛。
Afsar说:“大多数机械臂和人形机器人都是围绕驱动它们的伺服电机设计的。这带来了集成上的限制,因为伺服电机难以密集封装,并且往往将质量集中在它们所驱动的关节附近。相比之下,纤维形式的人工肌肉可以紧密地组装在机器人或外骨骼内部,并分布在整个结构中,而不是集中在关节附近。”
这些电液肌肉对于可穿戴应用尤其有用,其基本原理也可能具有更广泛的应用。
这项工作代表了纤维形式软体驱动领域的重大进展,解决了该领域长期存在的若干难题,特别是在便携性和功率密度方面。泵中没有运动部件使这些肌肉能够静音运行,这对于假肢装置和辅助服装来说是一个重大优势。(来源:中国科学报 张晴丹)
相关论文信息:https://doi.org/10.1126/scirobotics.ady6438